系列文章目录
经过之前对于MOOSapp类各个成员函数的学习,我可以进一步继续此次实验了。这篇文章主要是接MOOS编程入门(1)这篇文章的续写部分
提示:写完文章后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
- 系列文章目录
- 四、写自己的moosapp
- 1.完成初步内容
- 2.对程序进行编译
- 3.查看程序效果
- 五、修改moosapp
- 总结
四、写自己的moosapp
不多逼逼,直接跳到续写部分~
1.完成初步内容
(3)编辑Odometry.cpp来订阅变量NAV_X 和 NAV_Y
void Odometry::RegisterVariables()
{
// m_Comms.Register("FOOBAR", 0);
Register("NAV_X", 0);
Register("NAV_Y", 0);
}
(4)给当前x,y和前一时刻x,y赋值
bool Odometry::OnNewMail(MOOSMSG_LIST &NewMail)
{
MOOSMSG_LIST::iterator p;
for(p=NewMail.begin(); p!=NewMail.end(); p++)
{
CMOOSMsg &msg = *p;
#if 0 // Keep these around just for template
string key = msg.GetKey();
string comm = msg.GetCommunity();
double dval = msg.GetDouble();
string sval = msg.GetString();
string msrc = msg.GetSource();
double mtime = msg.GetTime();
bool mdbl = msg.IsDouble();
bool mstr = msg.IsString();
#endif
string key = msg.GetKey();
if(key == "NAV_X")
{
m_previous_x = m_current_x;
m_current_x = msg.GetDouble();
}
if(key == "NAV_Y")
{
m_previous_y = m_current_y;
m_current_y = msg.GetDouble();
}
return(true);
}
}
(4)发布计算的总里程数ODOMETRY DIST
bool Odometry::Iterate()
{
m_iterations++;
if(m_first_reading == 1)
{
m_total_distance =sqrt(m_current_x*m_current_x+m_current_y*m_current_y);
Notify( "ODOMETRY_DIST",m_total_distance);
m_first_reading=0;
}
else
{
m_total_distance =sqrt((m_current_x-m_previous_x)*(m_current_x-m_previous_x)+(m_current_y-m_previous_y)*(m_current_y-m_previous_y))+m_total_distance;
Notify( "ODOMETRY_DIST",m_total_distance);
}
return(true);
}
(5)总体程序
/************************************************************/
/* NAME: Jane Doe */
/* ORGN: MIT */
/* FILE: Odometry.cpp */
/* DATE: */
/************************************************************/
#include <iterator>
#include "MBUtils.h"
#include "Odometry.h"
#include <math.h>
using namespace std;
//---------------------------------------------------------
// Constructor
Odometry::Odometry()
{
m_iterations = 0;
m_timewarp = 0;
m_first_reading= 1;
m_current_x = 0 ;
m_current_y = 0;
m_previous_x = 0;
m_previous_y = 0;
m_total_distance = 0;
}
//---------------------------------------------------------
// Destructor
Odometry::~Odometry()
{
}
//---------------------------------------------------------
// Procedure: OnNewMail
bool Odometry::OnNewMail(MOOSMSG_LIST &NewMail)
{
MOOSMSG_LIST::iterator p;
for(p=NewMail.begin(); p!=NewMail.end(); p++)
{
CMOOSMsg &msg = *p;
#if 0 // Keep these around just for template
string key = msg.GetKey();
string comm = msg.GetCommunity();
double dval = msg.GetDouble();
string sval = msg.GetString();
string msrc = msg.GetSource();
double mtime = msg.GetTime();
bool mdbl = msg.IsDouble();
bool mstr = msg.IsString();
#endif
string key = msg.GetKey();
if(key == "NAV_X")
{
m_previous_x = m_current_x;
m_current_x = msg.GetDouble();
}
if(key == "NAV_Y")
{
m_previous_y = m_current_y;
m_current_y = msg.GetDouble();
}
return(true);
}
}
//---------------------------------------------------------
// Procedure: OnConnectToServer
bool Odometry::OnConnectToServer()
{
// register for variables here
// possibly look at the mission file?
// m_MissionReader.GetConfigurationParam("Name", <string>);
// m_Comms.Register("VARNAME", 0);
RegisterVariables();
return(true);
}
//---------------------------------------------------------
// Procedure: Iterate()
// happens AppTick times per second
bool Odometry::Iterate()
{
m_iterations++;
if(m_first_reading == 1)
{
m_total_distance =sqrt(m_current_x*m_current_x+m_current_y*m_current_y);
Notify( "ODOMETRY_DIST",m_total_distance);
m_first_reading=0;
}
else
{
m_total_distance =sqrt((m_current_x-m_previous_x)*(m_current_x-m_previous_x)+(m_current_y-m_previous_y)*(m_current_y-m_previous_y))+m_total_distance;
Notify( "ODOMETRY_DIST",m_total_distance);
}
return(true);
}
//---------------------------------------------------------
// Procedure: OnStartUp()
// happens before connection is open
bool Odometry::OnStartUp()
{
list<string> sParams;
m_MissionReader.EnableVerbatimQuoting(false);
if(m_MissionReader.GetConfiguration(GetAppName(), sParams)) {
list<string>::iterator p;
for(p=sParams.begin(); p!=sParams.end(); p++) {
string original_line = *p;
string param = stripBlankEnds(toupper(biteString(*p, '=')));
string value = stripBlankEnds(*p);
if(param == "FOO") {
//handled
}
else if(param == "BAR") {
//handled
}
}
}
m_timewarp = GetMOOSTimeWarp();
RegisterVariables();
return(true);
}
//---------------------------------------------------------
// Procedure: RegisterVariables
void Odometry::RegisterVariables()
{
// m_Comms.Register("FOOBAR", 0);
Register("NAV_X", 0);
Register("NAV_Y", 0);
}
2.对程序进行编译
程序的整体架构都是采用的cmake格式,这里对源代码进行编译时也需要使用cmake来进行编译。CMake是一种跨平台编译工具,CMake主要是编写CMakeLists.txt文件。通过cmake命令将CMakeLists.txt文件转化为make所需的Makefile文件,再用make命令编译源代码,生成可执行程序或库文件。具体使用方法我主要参考如下网站:CMake方式编译
(1)项目结构
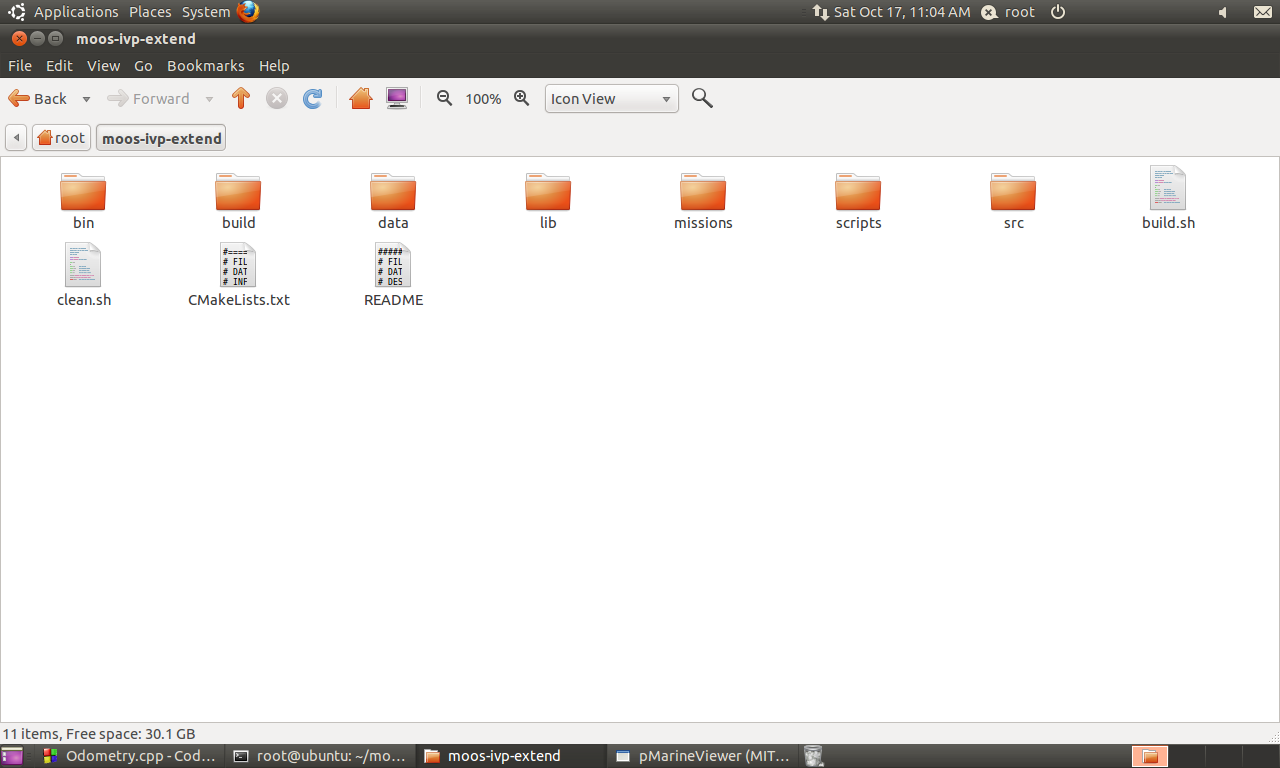
build目录 用来构建项目(编译构建中间文件等)
include目录 放置头文件。
src目录 放置源代码实现文件。
(2)CMake方式编译生成库文件
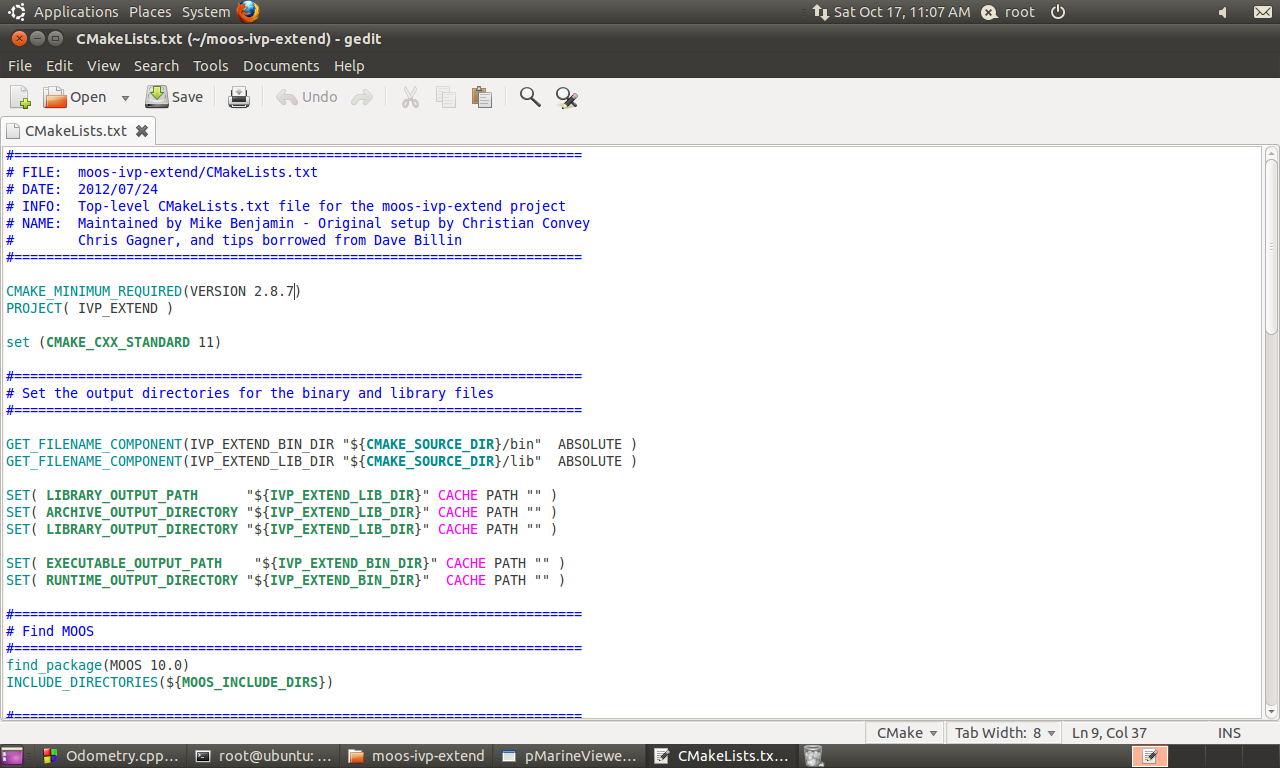
这是cmakelist文件,第一行标注的是使用的cmake版本号,可以使用
cmake-vesion
来对版本号进行查看,如果版本不一致,可以在cmakelist中进行修改或者升级cmake版本。
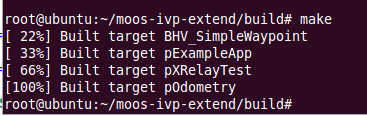
(3)编译文件
进入到build目录中,先输入cmake进行编译,在输入make进行编译
cd build
cmake
make
如下图显示则编译完成。
3.查看程序效果
输入
cd moos-ivp-extend/missions/alder
pAntler --MOOSTimeWarp=10 alder.moos
可以看到计算的里程数已经在界面上显示了
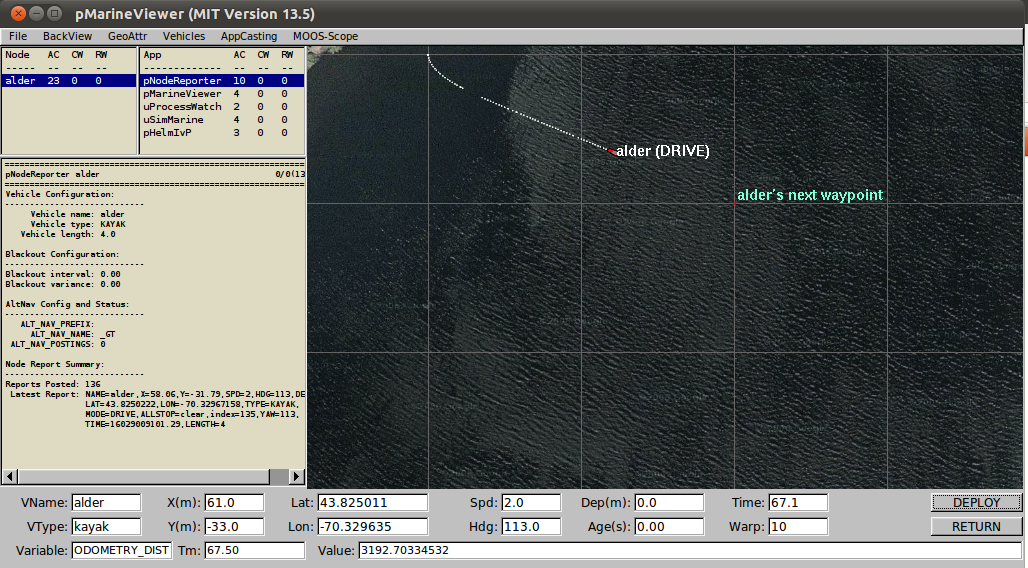
这里有一个小问题,由于NAV_X、NAV_Y两个变量是由uSimMarine这个app来进行发布的,而且发布的频率是10hz,而我们写的app默认运行频率在4hz,那么这就可能导致我们计算的里程数只有真实里程数的一半,因为中间很多消息没有订阅到。为了修改这个问题我们可以通过对moos文件进行修改。打开以下目录:

对alder.moos文件进行编辑:
//------------------------------------------
// pOdometry config block
ProcessConfig = pOdometry
{
AppTick = 10
CommsTick = 10
}
添加一个配置块,将我们app的运行频率改到10hz即可。AppTick和CommsTick决定的就是app的运行频率。
五、修改moosapp
接下来要做的任务就是对moosapp进行修改,使其航行到50m的里程的时候就返回。这个操作需要我们对Helm进行配置。有关Helm的具体设置将在后面的学习中学到,现在就是初步学习一下。
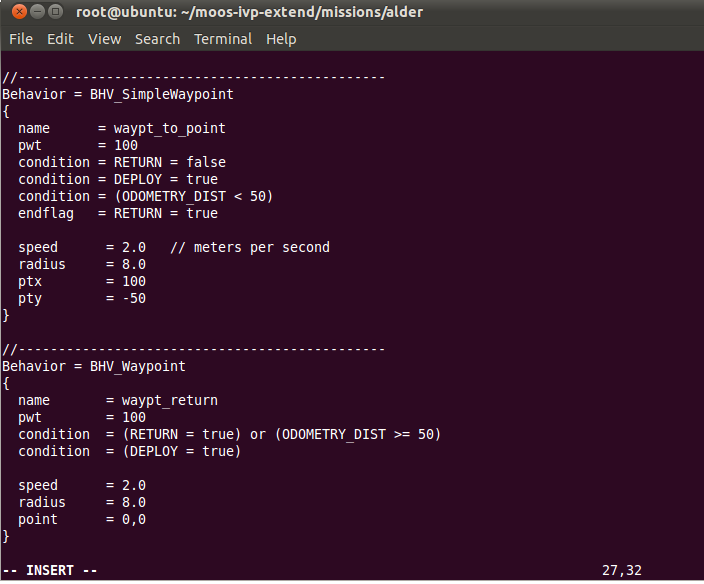
就上面的写的那个目录,打开文件 alder.bhv。对其进行编辑添加代码。加了一个condition条件:
//----------------------------------------------
Behavior = BHV_SimpleWaypoint
{
name = waypt_to_point
pwt = 100
condition = RETURN = false
condition = DEPLOY = true
condition = (ODOMETRY_DIST < 50) // <-- Add this line
endflag = RETURN = true
speed = 2.0 // meters per second
radius = 8.0
ptx = 100
pty = -50
}
把下面的代码也进行修改,增加条件:
condition = (RETURN = true) or (ODOMETRY_DIST >= 50)
condition = DEPLOY = true
如图所示:
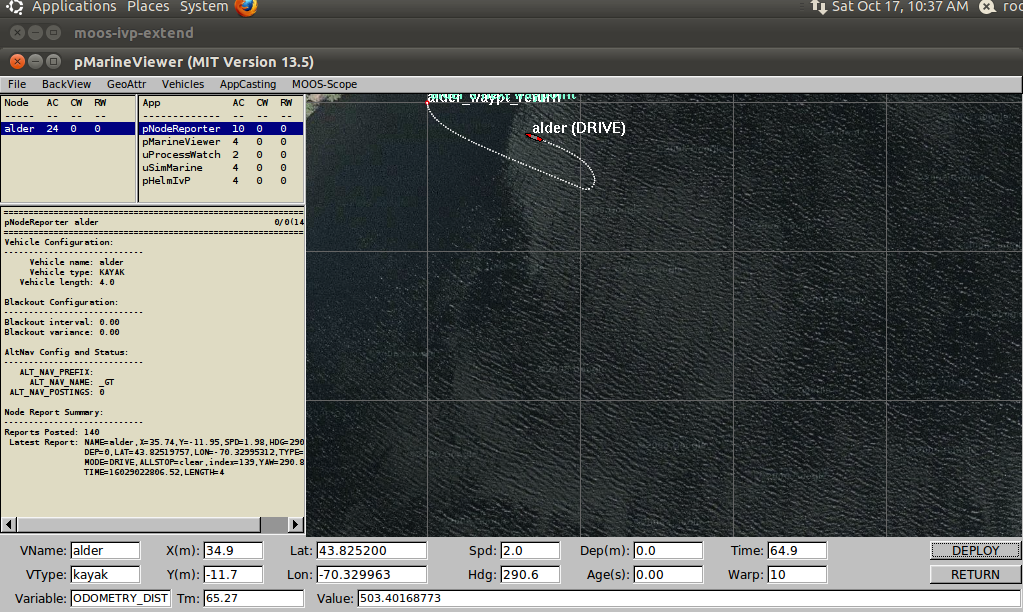
再次执行程序可以发现,AUV的航程被我们修改了:
总结
对第四个实验的讲解到这里就完成了,主要完成了如何创建一个自己的app以及实现变量的订阅、发布和程序编译。
最后
以上就是高挑苗条最近收集整理的关于MOOS-ivp 实验四 MOOS编程入门(3)系列文章目录四、写自己的moosapp五、修改moosapp总结的全部内容,更多相关MOOS-ivp内容请搜索靠谱客的其他文章。








发表评论 取消回复