七七八八的,毕业设计弄的差不多了。以前遗留的问题也解决的差不多了(虽然有些粗糙)。现在,有点时间来总结毕业设计中的一些内容。
先说点感悟:对于毕业设计做的自动顶空系统来说,我感觉最恼人的要数这个ADS1248的驱动了。对于这个驱动,我他妈差不多整整弄了两个多月(请原谅我爆句粗口)。(当然,按照导师的说法,我是跨了两年)。在那差不多两个月里,我有很多次找到了以前做OJ题,调试8次改不出来的感觉(气的牙根痒痒,妈的就是出不来)。当然,也有不少次因为找到一点点眉目,就高兴的能飞的感觉。 最后导师可能怕弄出来个精神病出来,最后给的源码参考。
好了,言归正传。对于ADS1248来说,驱动其工作基本和利用通信协议驱动EEPROM、FLASH差不多,都是发送命令,然后接受模块的返回信息。只不过对于EEPROM和FLASH’等存储模块来说,ADS1248要相对复杂些。总结来说,可以分为以下步骤:
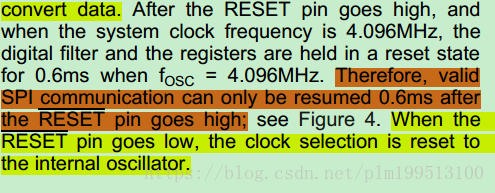
芯片复位。将ADS1248的nRESET引脚置低即可进行芯片复位。这里要注意一点的是芯片在复位之后0.6ms内不能进行SPI通信。如下图所示。
芯片内部初始化设置。在这里主要是向芯片内的寄存器写入相关的值,来对芯片进行相应的设置。一般的设置包括:
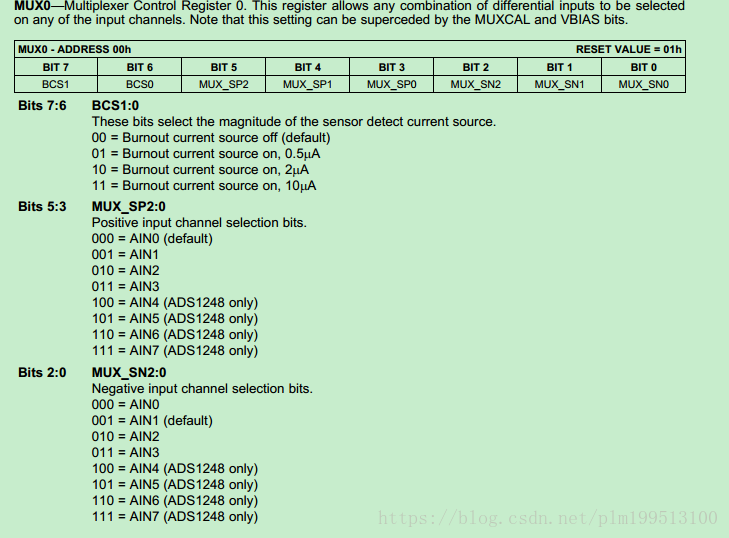
(1)、写入MUX0寄存器,设置正极和负极的输入端口。如下图所示。
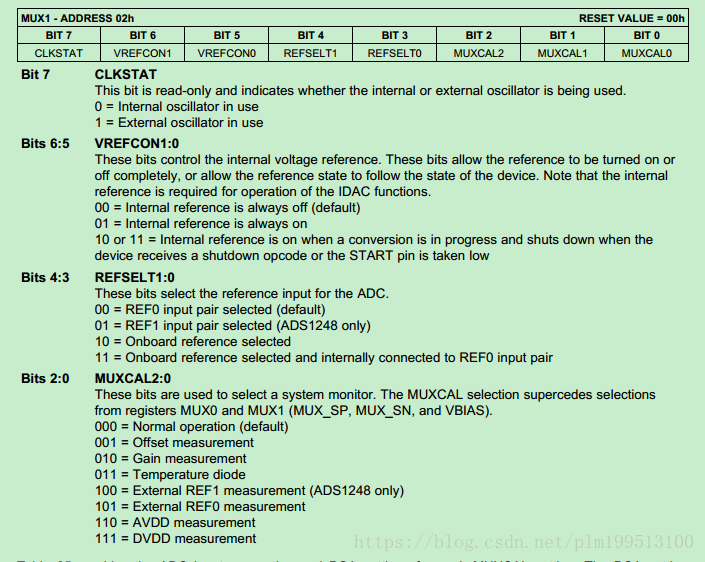
(2)、写入MUX1寄存器,设置内部晶振时钟源,是否启动内部参考电压,选择参考电平。如下图所示。
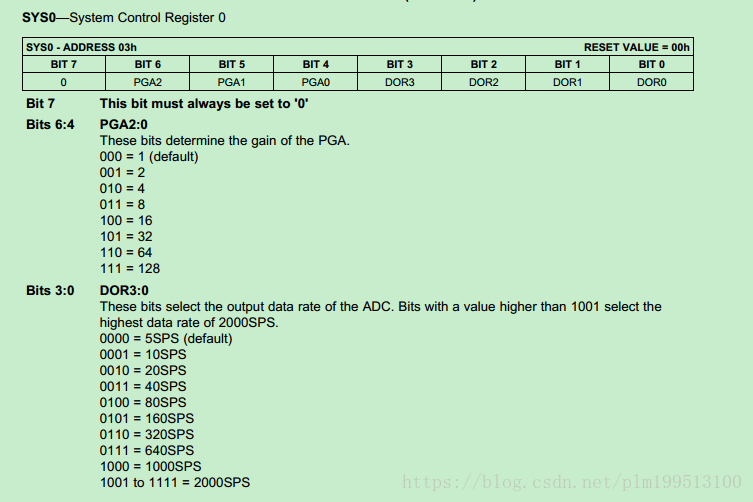
(3)、写入SYS0寄存器,设置ADS的输出速率和增益。如下图所示。
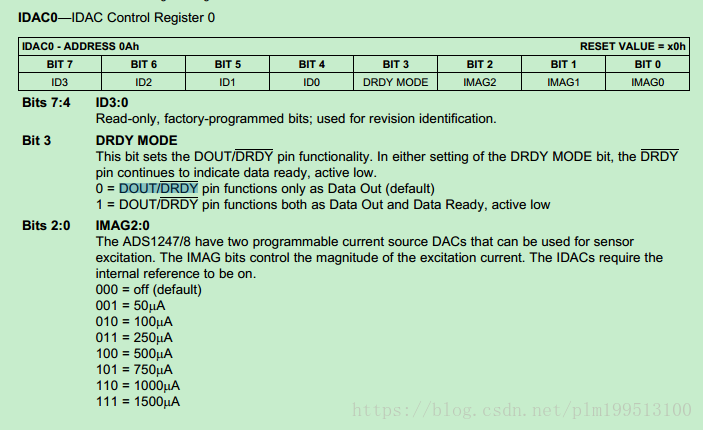
(4)、写入IDAC0寄存器,设置DOUT/DRDY引脚是否采用复用形式,以及恒流源的电流大小。如下图所示。
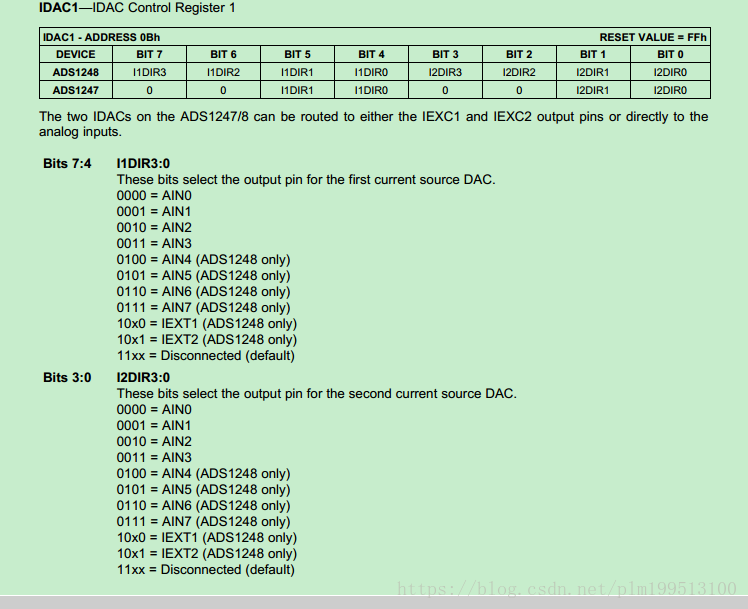
(5)、写入IDAC1寄存器,设置恒流源的输出引脚(差分输入和单端输入就是通过这个寄存器进行设置的)。如下图所示。
3. 芯片校准。包括自偏移校准->偏移校准->增益校准 本质上也就是向MUX1寄存器写入相关的值。然后等待校准完成。
4 . 开始转换,并读取转换后的值。这里需要注意两点。
(1)、转换是否完成,需要通过nDRDY引脚是否置低(或者是否产生一个脉冲,这个要根据具体的设置)来判断。即在读取数据之前要判断nDRDY引脚是否为低。
(2)、ADS1248是24位进度的模数转换器。所以读出的数据是24位数据,我们如果用int(4个字节)类型来存储的话,需要进行数据的拼接(接收到的数据是一般是3个单字节的),而且需要符号(正负号)转换。具体的解释,见下文。
ADS1248驱动源码如下:
//写命令
static void ADS1248_WriteCmd(uint8_t Cmd)
{
AD_nCS_LOW; //拉低片选线,使能SPI通信
HAL_SPI_Transmit(&hspi1, &Cmd, 1,HAL_MAX_DELAY);
AD_nCS_HIGH; //通信结束,拉高片选
}
////读寄存器
void ADS1248_ReadReg(uint8_t RegAddr,uint8_t *Buffer,uint8_t Length)
{
uint8_t Cmd[2];
AD_nCS_LOW;
AD_START_HIGH; //在写寄存器时吗,需要将START拉高(不让其进入睡眠模式)
Cmd[0]=ADC_CMD_RREG|RegAddr;
Cmd[1]=Length-1;
HAL_SPI_Transmit(&hspi1,Cmd,2,HAL_MAX_DELAY); //发送命令
HAL_SPI_Receive(&hspi1, Buffer, Length, HAL_MAX_DELAY); //接收寄存器数据
Cmd[0]=ADC_CMD_NOP;
HAL_SPI_Transmit(&hspi1, Cmd,1,HAL_MAX_DELAY); //最后在发送一个NOP,强制拉高DOUT
AD_nCS_HIGH;
}
//写寄存器
static void ADS1248_WriteReg(uint8_t RegAddr,uint8_t *Buffer,uint8_t Length)
{
uint8_t Cmd[2];
AD_nCS_LOW;
AD_START_HIGH; //在写寄存器时吗,需要将START拉高(不让其进入睡眠模式)
HAL_Delay(20); //硬件延迟
Cmd[0]=ADC_CMD_WREG|RegAddr;
Cmd[1]=Length-1;
HAL_SPI_Transmit(&hspi1, Cmd, 2,HAL_MAX_DELAY); //指定向指定寄存器写入指定字节数据
HAL_SPI_Transmit(&hspi1, Buffer, Length,HAL_MAX_DELAY); //发送数据字节
HAL_Delay(20); //硬件延迟
AD_nCS_HIGH;
AD_START_LOW;
}
//判断忙状态
uint8_t ADS1248_WaitBusy(uint32_t Timeout)
{
uint32_t i = 0;
AD_nCS_LOW;
while(nAD_DRDY_STATE > 0)
{
HAL_Delay(1);
i++;
if(i>Timeout)
return 1;
}
AD_nCS_HIGH;
return 0;
}
//ADS1248系统校准 校准顺序为:自偏移校准->偏移校准->增益校准 .
static uint8_t ADS1248_Calibrate(uint8_t Gain)
{
uint8_t R=0;
uint8_t Cmd;
ADS1248_WriteReg(ADC_REG_SYS0,&Gain,1); // 设置增益值、ADC输出数据率
Cmd=0x20; //0010 0000
ADS1248_WriteReg(ADC_REG_MUX1,&Cmd,1); // 设置系统监测为自偏移测量
ADS1248_WriteCmd(ADC_CMD_SELFOCAL); // 自偏移校准
R |= ADS1248_WaitBusy(500); // 等待校准完成
Cmd=0x21; //0010 0001
ADS1248_WriteReg(ADC_REG_MUX1,&Cmd,1); // 设置系统监测为偏移测量
ADS1248_WriteCmd(ADC_CMD_SYSOCAL); // 系统偏移校准
R |= ADS1248_WaitBusy(500); // 等待校准完成
Cmd=0x22;
ADS1248_WriteReg(ADC_REG_MUX1,&Cmd,1); // 设置系统监测为增益测量
ADS1248_WriteCmd(ADC_CMD_SYSGCAL); // 系统增益校准
R |= ADS1248_WaitBusy(500); // 等待校准完成
return R;
}
//复位ADS1248
void ADS1248_Reset()
{
AD_nCS_HIGH;
AD_START_HIGH; //START要保持高电平,为了接下来写入寄存器
nADRST_LOW; //置低nADRST,复位ADS1248
HAL_Delay(20);
nADRST_HIGH;
HAL_Delay(20);
}
//ADS1248初始化
void ADS1248_Init(void)
{
uint8_t Cmd;
uint8_t Gain;
ADS1248_Reset(); //系统复位
HAL_Delay(100);
Gain = ADC_GAIN_16|ADC_SPS_20;
//初始化MUX0多路复用控制寄存器
Cmd = 0x17 ; //00 010 111,Bit7-6:传感器电流源检测不使用,Bit5-3:正输入为AIN2,Bit2-0:负输入为AIN7
ADS1248_WriteReg(ADC_REG_MUX0,&Cmd,1);
Cmd=0x20 ;//0 01 00 000
ADS1248_WriteReg(ADC_REG_MUX1,&Cmd,1); // 将MUX1置,(内部晶振时钟源,启动内部参考电压,选择REF0作为参考电平,普通操作)
// 校准时MUX1将被重新赋值,因此这里可以不用对其进行赋值,校准之后再配置内部参考电压
ADS1248_WriteReg(ADC_REG_SYS0,&Gain,1); // 设置增益值、ADC输出数据率
Cmd=0x07 ;//0000 0111 // 设置极大恒流源电流值1500uA(1.5mA)
ADS1248_WriteReg(ADC_REG_IDAC0,&Cmd,1);
Cmd=0x17 ;//0010 0111 // 选择第一个恒流源输出引脚 (AIN2) 选择第二个电流源输出引脚(AIN7)
ADS1248_WriteReg(ADC_REG_IDAC1,&Cmd,1);
Cmd=ADS1248_Calibrate(Gain); // 通道校准.配置转换参数
//重新配置MUX1
Cmd=0x20; //0011 0000
ADS1248_WriteReg(ADC_REG_MUX1,&Cmd,1); // 启用内部参考电压总是开启
AD_START_LOW;
}
//启动转换
void ADS1248_Start(uint8_t CovMode)
{
AD_START_HIGH ; //启动ADC转换
if(CovMode==ADC_MODE_SINGLECOV)
AD_START_LOW; //产生启动脉冲
}
//停止转换
void ADS1248_Stop()
{
AD_START_LOW; //停止转换
}
//读取ADS1248中的转换数据
int32_t ADS1248_Read()
{
uint8_t Cmd[5]={ADC_CMD_RDATA,ADC_CMD_NOP,ADC_CMD_NOP,ADC_CMD_NOP,ADC_CMD_NOP}; //最后一个字节是为了强制拉高nDRDY
uint8_t Buf[5];
int32_t Data = 0;
AD_nCS_LOW;
HAL_SPI_TransmitReceive(&hspi1,Cmd,Buf,5,HAL_MAX_DELAY); //1个命令,3个空操作接收数据,最后一个拉高nDRDY
AD_nCS_HIGH;
Data=Buf[1];
Data=Data*256+Buf[2];
Data=Data*256+Buf[3];
Data = Data*256; //先乘再除是为了保留正负号
return (Data/256);
}
头文件既全部源码见:这儿
相关疑问及解答:
1. 该如何选择ADS124中的SPI的时钟极性和时钟相位。即对于从设备来说,数据在时钟下降沿移入,在时钟的上升沿溢出?
答:如下图所示:
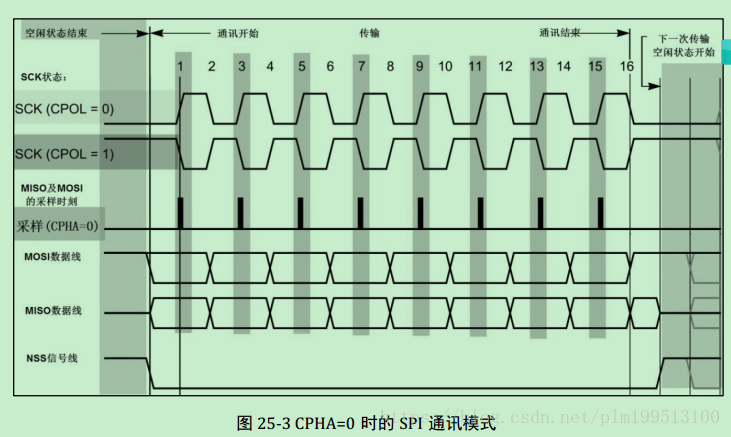
对于SPI协议来说,它的时钟极性和时钟相位的设定是为了兼容不同从设备的要求。其基本的概念就不说了,强调说一下时钟相位:它指的是在奇数边沿还是偶数边沿被采样。注意是“采样”。
对于信号传输来说,一个是采样,一个是切换。如上图所示,信号在奇数边沿被采样,那么它就会在被在偶数边沿切换。当信号在采样时,其应该保持稳定状态,当其处在切换状态时,其可以发生状态切换。
如果有这么个从设备,有这样的通信规则:它的数据在时钟下降沿移入,在时钟的上升沿移出。那么对于主设备来说,其就需要设置时钟的极性和相位:使得时钟下降沿时为采样时刻,数据保持在稳定的状态,这样从设备就可以再时钟的下降沿进行采样,满足了第一部分(它的数据在时钟下降沿移入);对于第二部分的规则来说(数据在时钟的上升沿移出),是处在切换的状态,此时时钟处在上升沿过程中,即时钟上升沿为切换时刻(也正好对应了时钟下降沿为采样时刻)。
有两种方式满足情况:SPOL = 0,CPHA = 1; 或者SPOL = 1,CPHA = 0。
综上所述,可以有简单一点的判断方式,即直接看从设备的的移入时刻。从设备需要下降沿移入,那么SPI就需要设置成下降沿采样的状态。从设备上升沿移入,SPI就需要设置成上升沿采样的状态。
2.对于ADS1248来说,为什么SPI的时钟分频设置成256就可以,设置成4就不行???
答:对于SPI通信来说,两个设备之间的通信速率受限于速率较低的那个设备。一般来说,主机的通信速率较高,外部设备的通信速率较低。在这里就是ADS1248的通信速率较低。而对于ADS1248,其最高的通信速率大概在2MHz左右(数据手册上Tsclk最小为500ns);而对于STM32主机来说,其通信速率取决于Pclk/分频率。在这里采用的是SPI1,它是挂在APB2上的,其设置Pclk的速率为72MHz,所以最小分频设置为64。设置成4的话,一定是不行的了。
2.ADS1248(24位精度)在读取数据的时候为什么要先左移8位,然后在右移8位?
答:这涉及到整数存储在内存中的问题。在内存中int型整数是32位,其是按照补码的形式存储的。即最高位代表符号位,0为正,1为负。但是ADS1248是24位精度,这就是说我们只能从ADS1248中读取24位有效数据。而且这24位有效数据也是按照补码的形式进行存储的。如果我们把这24位有效数据放在32位int型的后24位,则会发现其最高位就一直是0,也就是说这样读出的数据将一直是正数。(数据应该也是错误的,因为24位的有效数据最高位被当成了普通位)。
鉴于此,我们需要把24位有效数据的最高位移到32位int型的最高位。先左移8位(逻辑移位,低位补零),将最高位放到32位的最高位;再右移8位(算数移位,最高位保留符号位),恢复原值(除去了符号位)。
最后
以上就是朴实水杯最近收集整理的关于ADS1248驱动及相关总结的全部内容,更多相关ADS1248驱动及相关总结内容请搜索靠谱客的其他文章。








发表评论 取消回复