文章目录
- 前言
- 一:卡尔曼滤波法原理简单理解
- 二:卡尔曼滤波法五条经典公式
- 三:卡尔曼滤波法实现
- 参考
前言
最近在做一个蓝牙定位的小项目,在采集ibeancon蓝牙基站RSSI信号强度数据时,噪声对精度的影响特别的严重,翻阅了些文献,里面提到一种卡尔曼滤波法,所以准备使用卡尔曼滤波法来处理我们收集来的一维rssi数据,这片文章,主要简单介绍了卡尔曼滤波法的原理,还有介绍一下如何用代码来实现卡尔曼滤波法。
一:卡尔曼滤波法原理简单理解
若直接看卡尔曼滤波法的经典五条方差,估计很多人都会懵逼,这都讲了啥,xx是个傻鸟。
这里简单介绍下:
1.卡尔曼滤波法是一种融合了当前的系统估计值(
X
t
)
X_t)
Xt)
当前测量值(
Z
t
Z_t
Zt),还有系统估计误差(W_t),测量误差(V_t) ,来对当前进行预测估计的算法进行预测的一个算法。
2.以一个实际温度的例子,介绍下卡尔曼滤波法
(1)要估计k时刻的实际温度值
(2)k-1时刻测量的温度值为 T k − 1 = 23 T_{k-1}=23 Tk−1=23
(3)假设 T k = T k − 1 = 25 T_k=T_{k-1}=25 Tk=Tk−1=25, T k T_k Tk即为系统估计值
(4)从温度计测量,得到k时刻的测量值为 T k z T_{kz} Tkz
(5)预测的噪声 v ( k ) = 4 v(k)=4 v(k)=4,可以是实际环境的温度在一段时间内,温度数据波动的方差
(6)测量的噪声 w ( k ) = 4 w(k)=4 w(k)=4,可以是温度计测量的误差
(7)当前有两个 T k = 23 T_k=23 Tk=23和 T k z = 25 T_{kz}=25 Tkz=25,然后引入kalman gain(k_g),通过**预测的噪声 v ( k ) = 4 v(k)=4 v(k)=4 ,与测量的噪声 w ( k ) = 4 w(k)=4 w(k)=4**的
来融合两个 T k = 23 T_k=23 Tk=23和 T k z = 25 T_{kz}=25 Tkz=25。
K g 2 = w ( x ) 2 / ( w ( k ) 2 + v ( k ) 2 ) {K_g}^2 = w(x)^2/(w(k)^2 + v(k)^2) Kg2=w(x)2/(w(k)2+v(k)2) = 5 2 / ( 5 2 + 4 2 ) 5^2 / ( 5^2 + 4^2 ) 52/(52+42)
(8)最终计算得 k g = 0.78 k_g=0.78 kg=0.78,则我们估算出k时刻的实际温度为:
T = T k + K g ∗ ( T k z − T k ) T = {T_k}+{K_g}*(T_{kz} - T_k) T=Tk+Kg∗(Tkz−Tk) = 23 + 0.78 ∗ ( 25 − 23 ) = 24.56 23 + 0.78*(25-23) = 24.56 23+0.78∗(25−23)=24.56
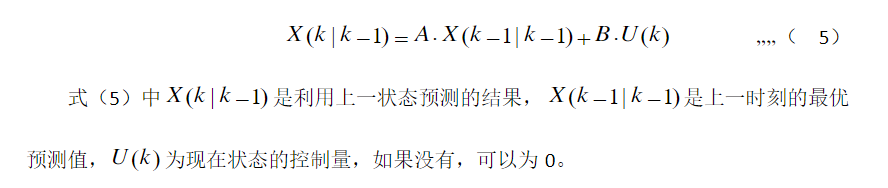
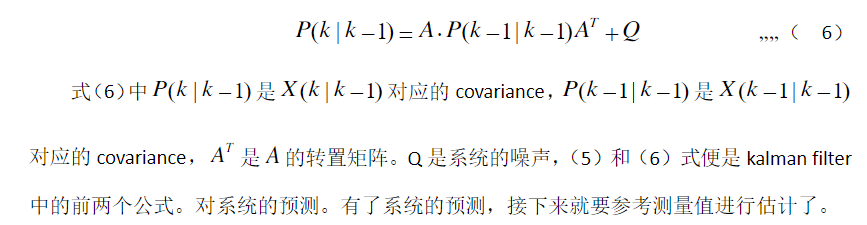
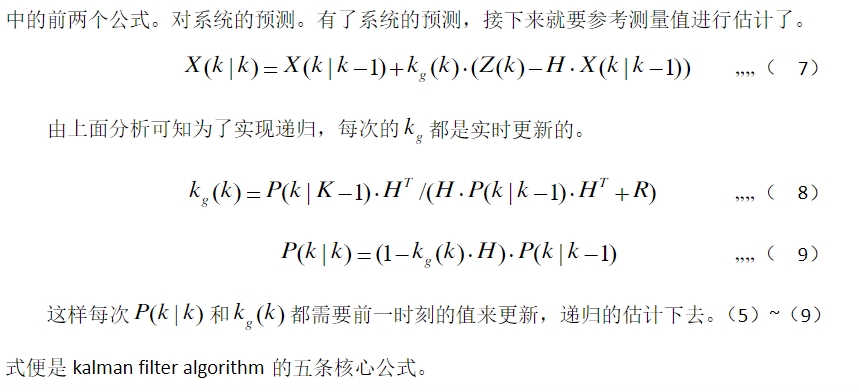
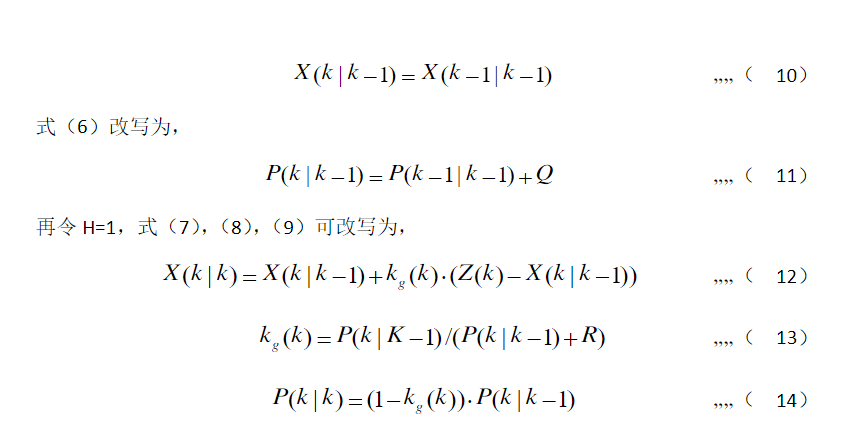
二:卡尔曼滤波法五条经典公式
三:卡尔曼滤波法实现
参考了卡尔曼滤波法C语言实现里边的实现,这里整理了C与python的一维实现。

import numpy as np
import matplotlib.pyplot as plt
"""
Q 系统噪声
R 测量噪声
X(k|k-1) 上一次状态预测结果
X(k-1|k-1) 上一时刻的最优预测值
P(k|k-1) X(k|k-1)对应的convariance协方差
P(k-1|k-1) X(k-1|k-1) 对应的convariance协方差
"""
x_last = 0
p_last = 0
Q = 0.1 #系统噪声
R = 0.5 #测量噪声
def kalman(z_measure,x_last=0,p_last=0,Q=0.018,R=0.0542):
x_mid = x_last
p_mid = p_last + Q
kg = p_mid/(p_mid + R)
x_now = x_mid + kg*(z_measure - x_mid)
p_now = (1-kg)*p_mid
p_last = p_now
x_last = x_now
return x_now,p_last,x_last
real = np.sin(np.linspace(0,10,100))
chao = np.random.rand(100)-0.5
x = real+chao
y = []
for i in range(len(x)):
pred,p_last,x_last = kalman(x[i],x_last,p_last,Q,R)
y.append(pred)
plt.plot(real,color="b") #真实值
plt.plot(x,color="g") #测量值
plt.plot(y,color="r") #预测值
plt.show()
参考
【1】卡尔曼滤波法C语言实现
【2】从放弃到精通!卡尔曼滤波从理论到实践~(视频)
最后
以上就是美满狗最近收集整理的关于卡尔曼滤波法进行一维数据滤波(python实现)前言一:卡尔曼滤波法原理简单理解二:卡尔曼滤波法五条经典公式三:卡尔曼滤波法实现参考的全部内容,更多相关卡尔曼滤波法进行一维数据滤波(python实现)前言一内容请搜索靠谱客的其他文章。








发表评论 取消回复