stm32汇编设计
- 0任务要求
- 1 stm32的三种boot模式
- 2 keil下的汇编编程
- 3 汇编程序
- 4 总结
0任务要求
(1)
请说明STM32的三种Boot模式的差异,“C语言各种变量的存储地址”作业代码基础上,研究至少两种boot模式下,代码下载(烧录)运行后所在的地址位置,与理论对比验证。
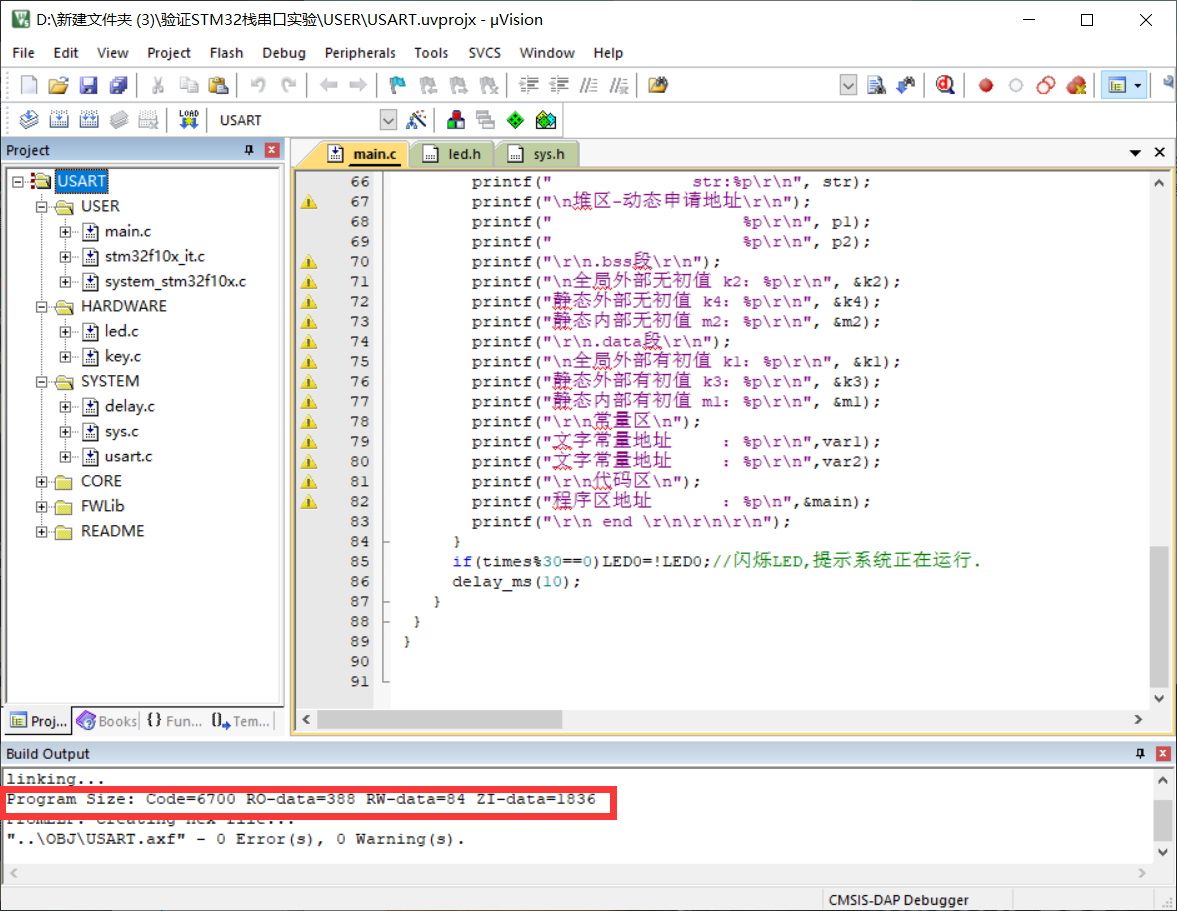
(2)在Keil下完成一个汇编程序的编写,学习动态调试变量;并注意观察最终生成
hex文件的各段的大小,以及Hex文件前8个字节内容,解释其含义。
(3)在上面Keil 汇编基础上
用汇编程序完成1~100 求和 (1+2+3+…+100)的程序,并将计算结果通过串口输出;
用汇编程序完成一个输出“Hello world”到串口的程序;
用汇编程序完成 每间隔1秒钟闪烁一次LED的程序。
1 stm32的三种boot模式
1.1 boot模式
(此部分转载自STM32的BOOT(模式),STM32三种BOOT模式介绍)
- stm32的片上存储区有3个部分:内置flash,内置sram,内置rom(system memory)这就决定了系统的启动方式有3种:从内置flash启动,从内置sram启动,从system memory启动,这三种启动方式是通过BOOT[1:0]这个两个脚来决定的。

- Main Flash memory(主闪存存储器):
是STM32内置的Flash,一般我们使用JTAG或者SWD模式下载程序时,就是下载到这个里面,重启后也直接从这启动程序。
- System memory(系统存储器):
从系统存储器启动,这种模式启动的程序功能是由厂家设置的。一般来说,这种启动方式用的比较少。系统存储器是芯片内部一块特定的区域,STM32在出厂时,由ST在这个区域内部预置了一段BootLoader,也就是我们常说的ISP程序,这是stm32的内置rom。出厂后无法修改。一般来说,我们选用这种启动模式时,是为了从串口下载程序,因为在厂家提供BootLoader中,提供了串口下载程序的固件,可以通过这个BootLoader将程序下载到系统的Flash中。
- Embedded Memory: 内置SRAM,既然是SRAM,自然也就没有程序存储的能力了,这个模式一般用于程序调试。假如我只修改了代码中一个小小的地方,然后就需要重新擦除整个Flash,比较的费时,可以考虑从这个模式启动代码(也就是STM32的内存中),用于快速的程序调试,等程序调试完成后,在将程序下载到SRAM中。
- 在系统上电的时候,cpu首先根据这两个脚来确定是哪种模式的启动,然后就是把相应模式的起始地址映射到0地址处,并从0地址处开始执行。
1.2 实例
(1)keil程序
keil程序是采用前面“C语言各种变量的存储地址”这一作业的串口通信程序,这里不再详细说明
while(zxx)
{
if(USART_RX_STA&0x8000)
{
len=USART_RX_STA&0x3fff;//µÃµ½´Ë´Î½ÓÊÕµ½µÄÊý¾Ý³¤¶È
printf("rnhello windows!:rnrn");
for(t=0;t<len&&USART_RX_BUF[t]==stop[t];zxx++,t++)
{if (zxx>=10) {zxx=0;break;}}
for(t=0;t<len;t++)
{
USART_SendData(USART1, USART_RX_BUF[t]);//Ïò´®¿Ú1·¢ËÍÊý¾Ý
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//µÈ´ý·¢ËͽáÊø
}
printf("rnrn");//²åÈë»»ÐÐ
USART_RX_STA=0;
}
else
{
times++;
if(times%500==0)
{
.......
}
if(times%30==0)LED0=!LED0;//ÉÁ˸LED,ÌáʾϵͳÕýÔÚÔËÐÐ.
delay_ms(10);
}
}
(2)Main Flash memory(主闪存存储器)
这种模式需要boot0=0,即boot0接地,也就是我们平时的下载方式,
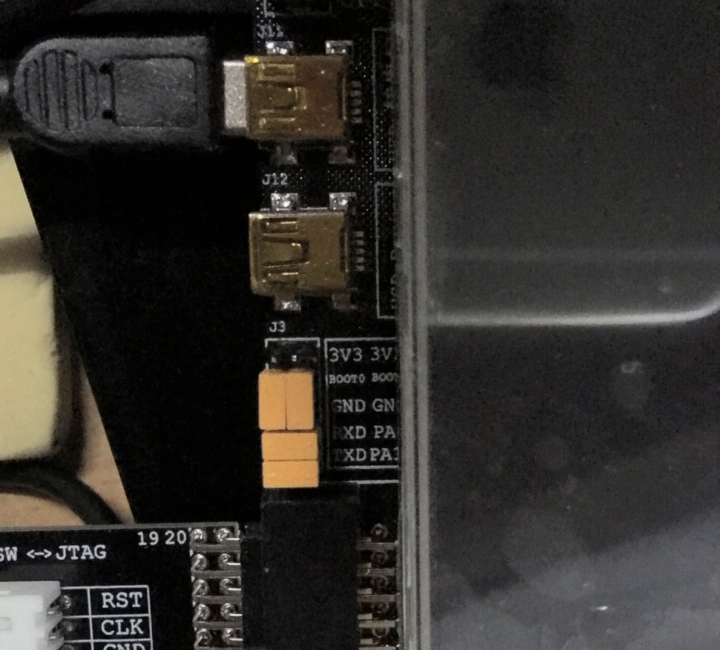
- 下载程序
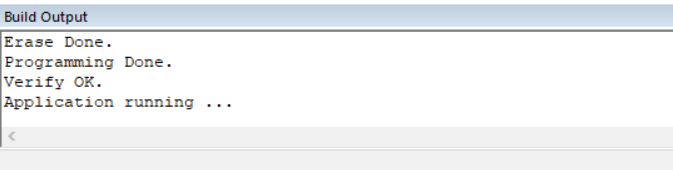
- 打开串口调试助手

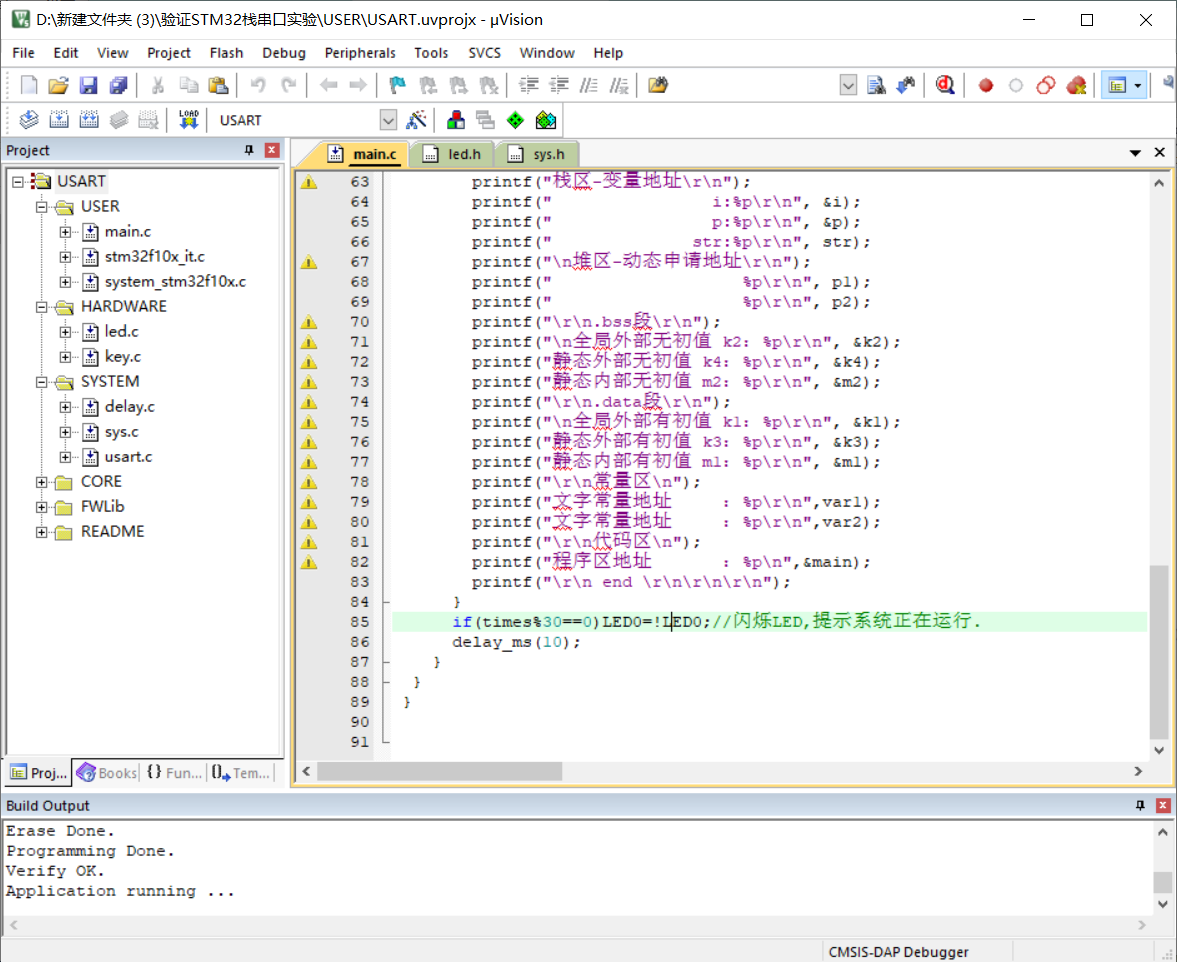
- 具体数据如下:
嵌入式串口实验
栈区-变量地址
i:2000075c
p:20000758
str:2000074c
堆区-动态申请地址
20000198
200001a0
.bss段
全局外部无初值 k2:20000008
静态外部无初值 k4:20000010
静态内部无初值 m2:20000018
.data段
全局外部有初值 k1:20000004
静态外部有初值 k3:2000000c
静态内部有初值 m1:20000014
常量区
文字常量地址 :080003a4
文字常量地址 :080003ac
代码区
程序区地址 :080001dd
end
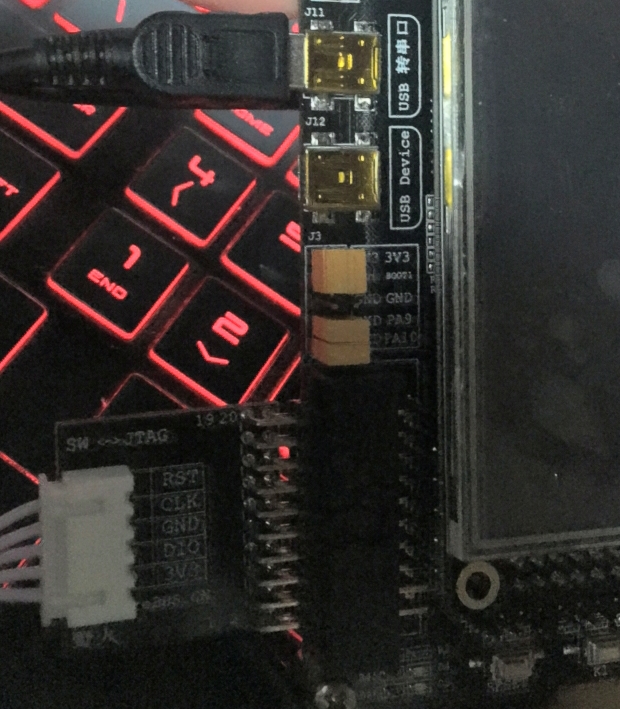
(3)系统存储模式
按照上面的跳帽操作后,可进入系统存储模式,(过程比较繁琐,不放图了);
-
下载程序
-
打开串口调试助手

-
详细数据:
嵌入式串口实验
栈区-变量地址
i:2000075c
p:20000758
str:2000074c
堆区-动态申请地址
20000198
200001a0
.bss段
全局外部无初值 k2:20000008
静态外部无初值 k4:20000010
静态内部无初值 m2:20000018
.data段
全局外部有初值 k1:20000004
静态外部有初值 k3:2000000c
静态内部有初值 m1:20000014
常量区
文字常量地址 :080003a4
文字常量地址 :080003ac
代码区
程序区地址 :080001dd
end
数据和上一种模式一模一样;
(4)内置sram
boot0=1,boot1=1;
内置SRAM,既然是SRAM,自然也就没有程序存储的能力了,这个模式一般用于程序调试。假如我只修改了代码中一个小小的地方,然后就需要重新擦除整个Flash,比较的费时,可以考虑从这个模式启动代码(也就是STM32的内存中),用于快速的程序调试,等程序调试完成后,在将程序下载到SRAM中。
- 硬件:
- 下载程序
- 打开串口调试助手

没有数据;
2 keil下的汇编编程
(参考自链接)
2.1 新建工程
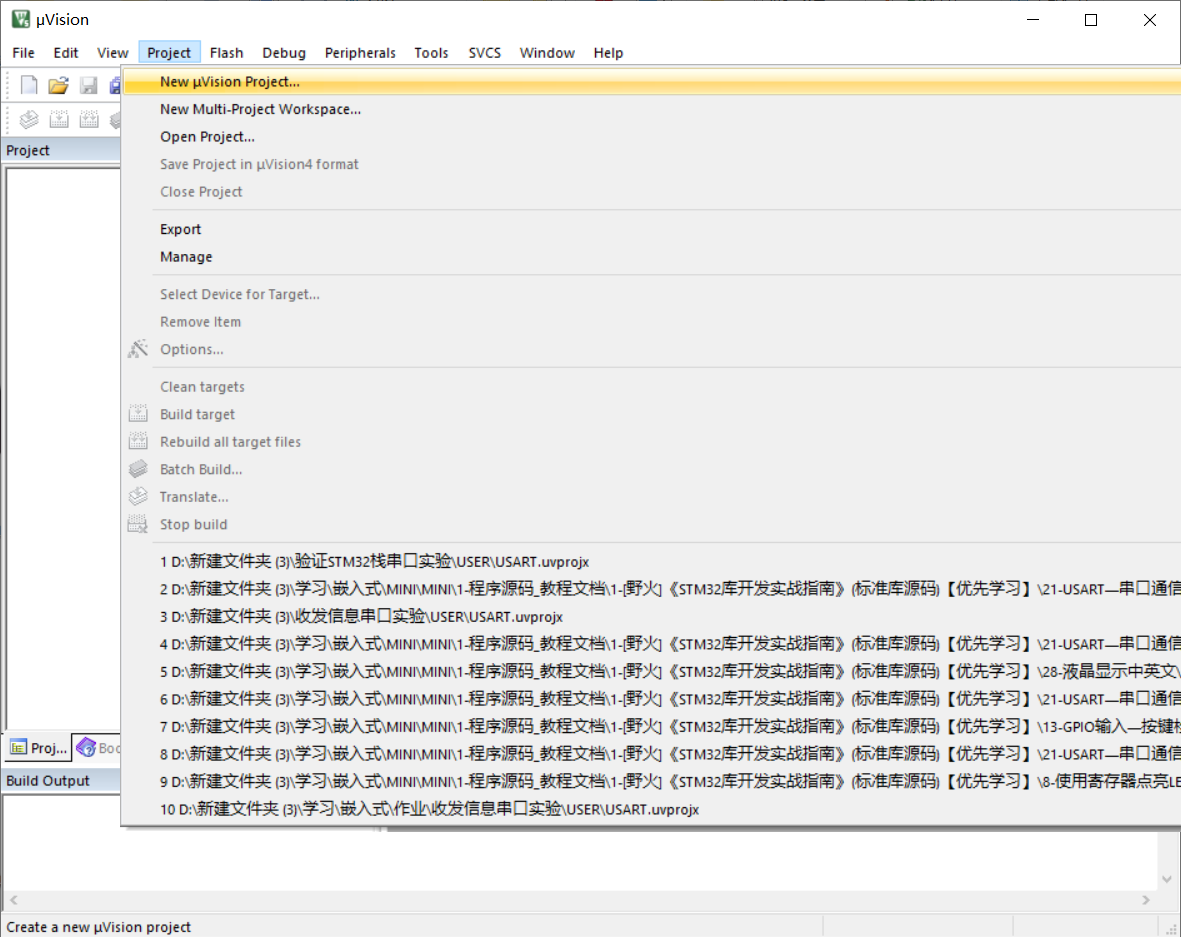
- 点击Project–>New uVision Project:
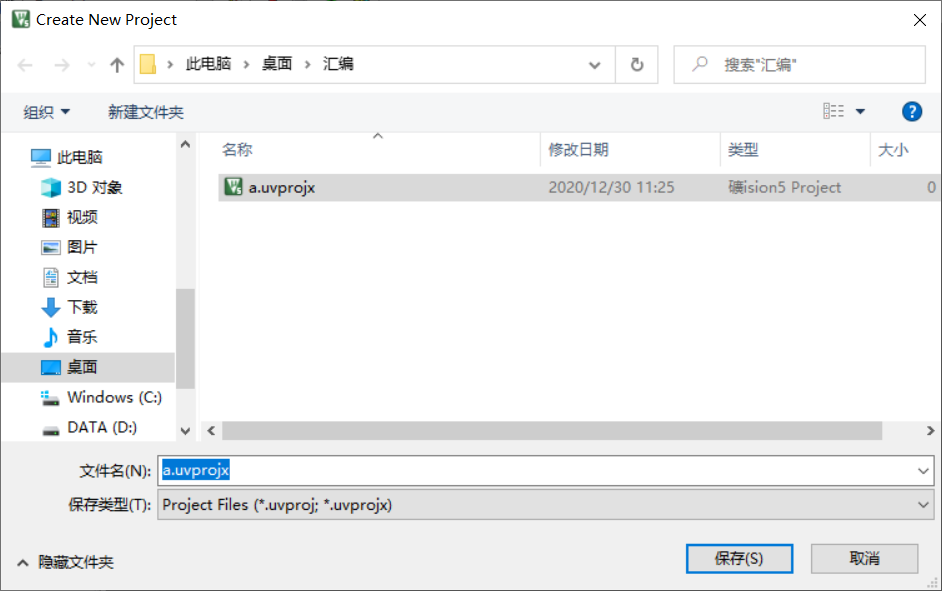
- 在弹出的窗口分别设置;
- 设置项目工程的路径;
- 设置项目工程的名称,这里使用a;
- 点击保存;
2.2配置环境
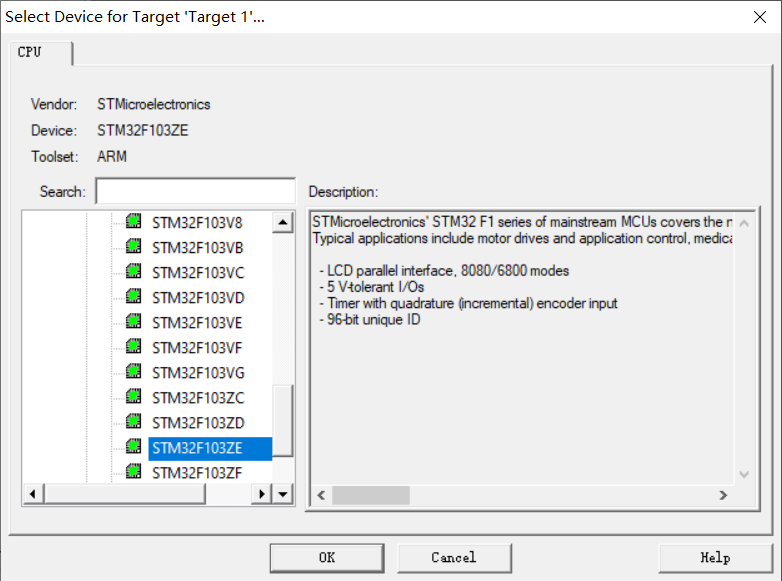
(1)选择设备
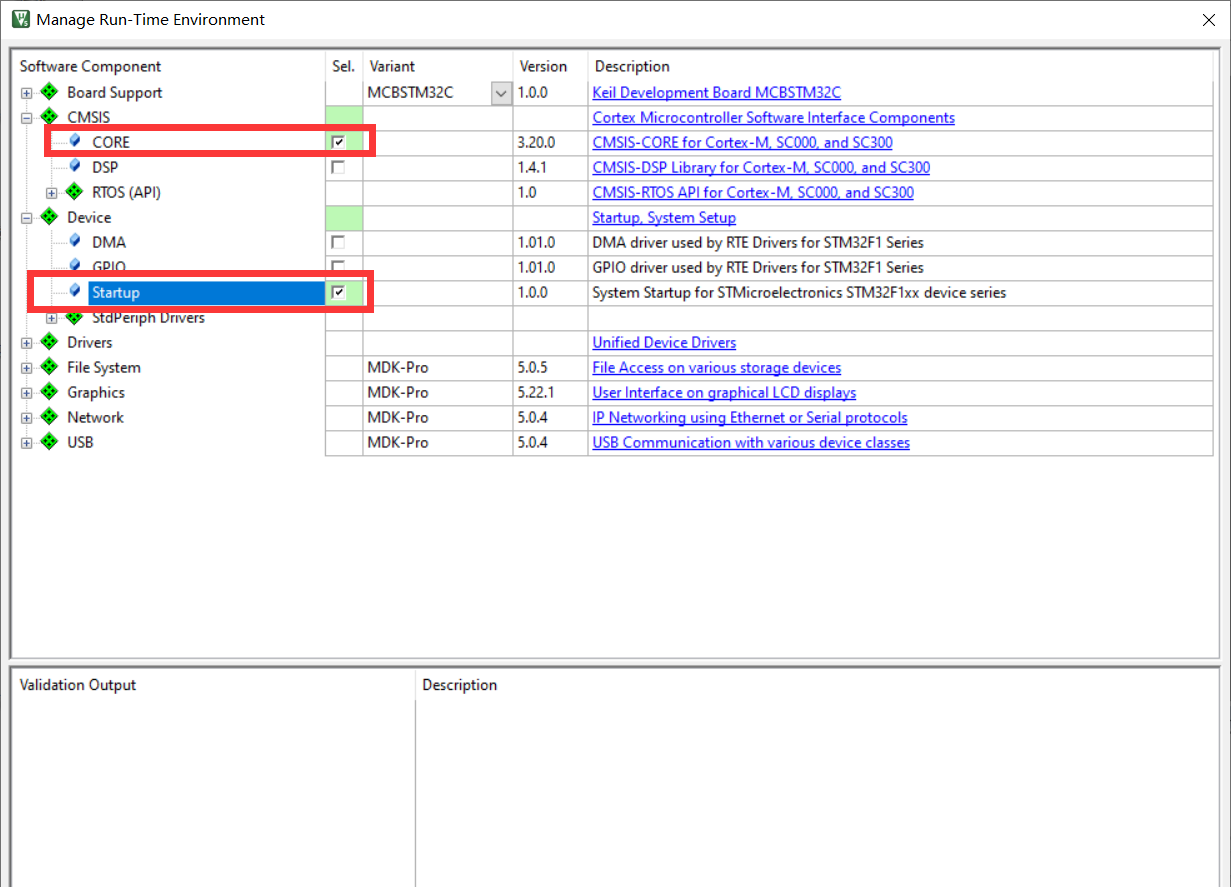
(2)选择运行环境
- ARM的CMSIS已经把开发所需要的软件组件都封装好了,因此直接选择即可;
CMSIS下选择CORE; Device下Startup,其中包含了启动文件;
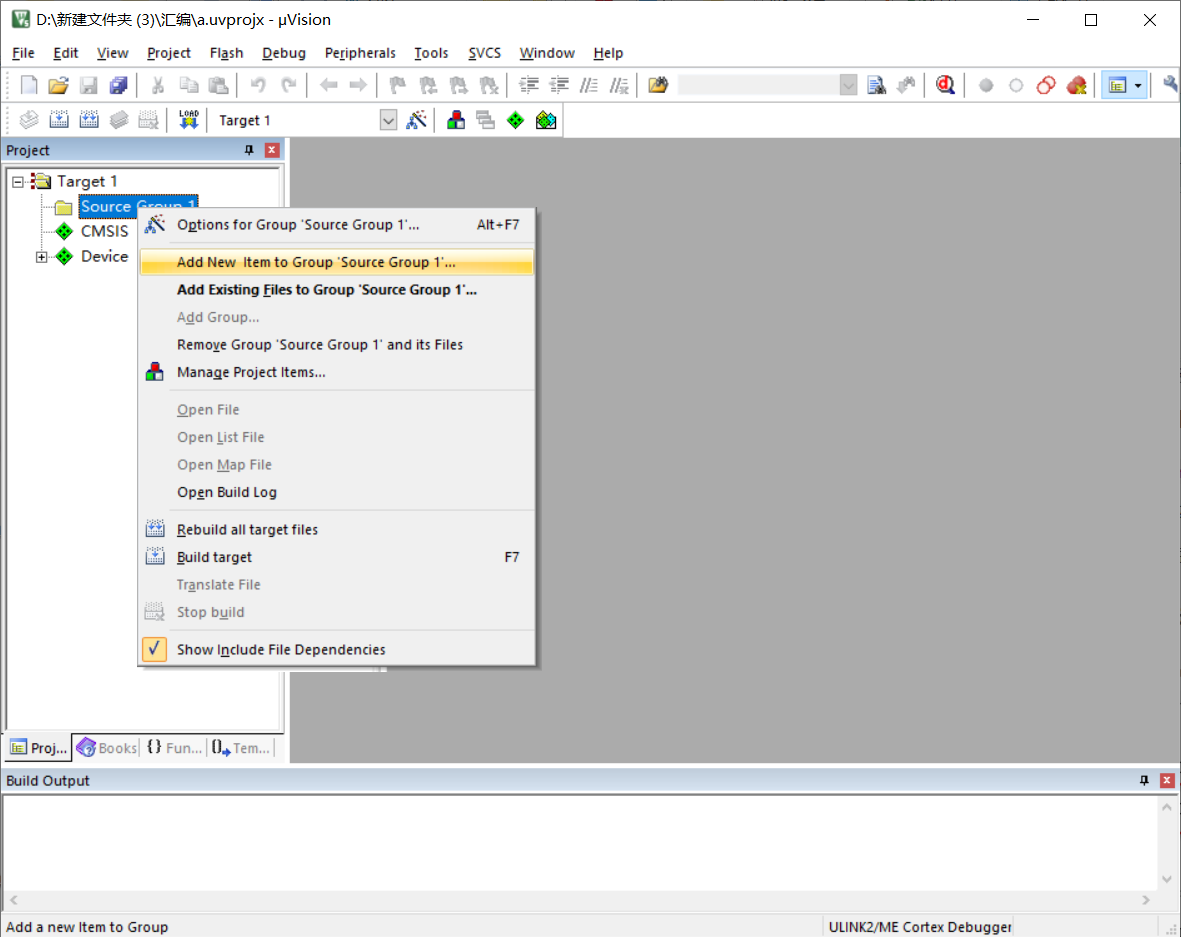
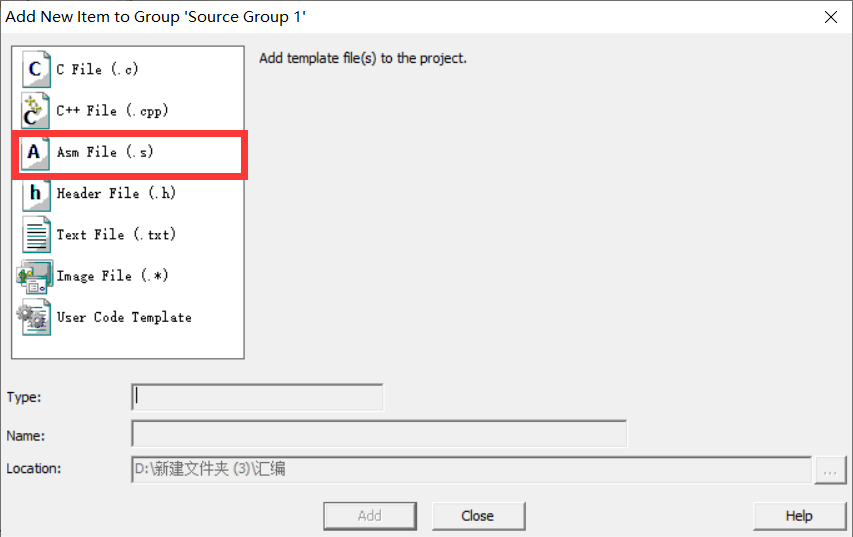
(3) 添加源文件
2.3 测试代码
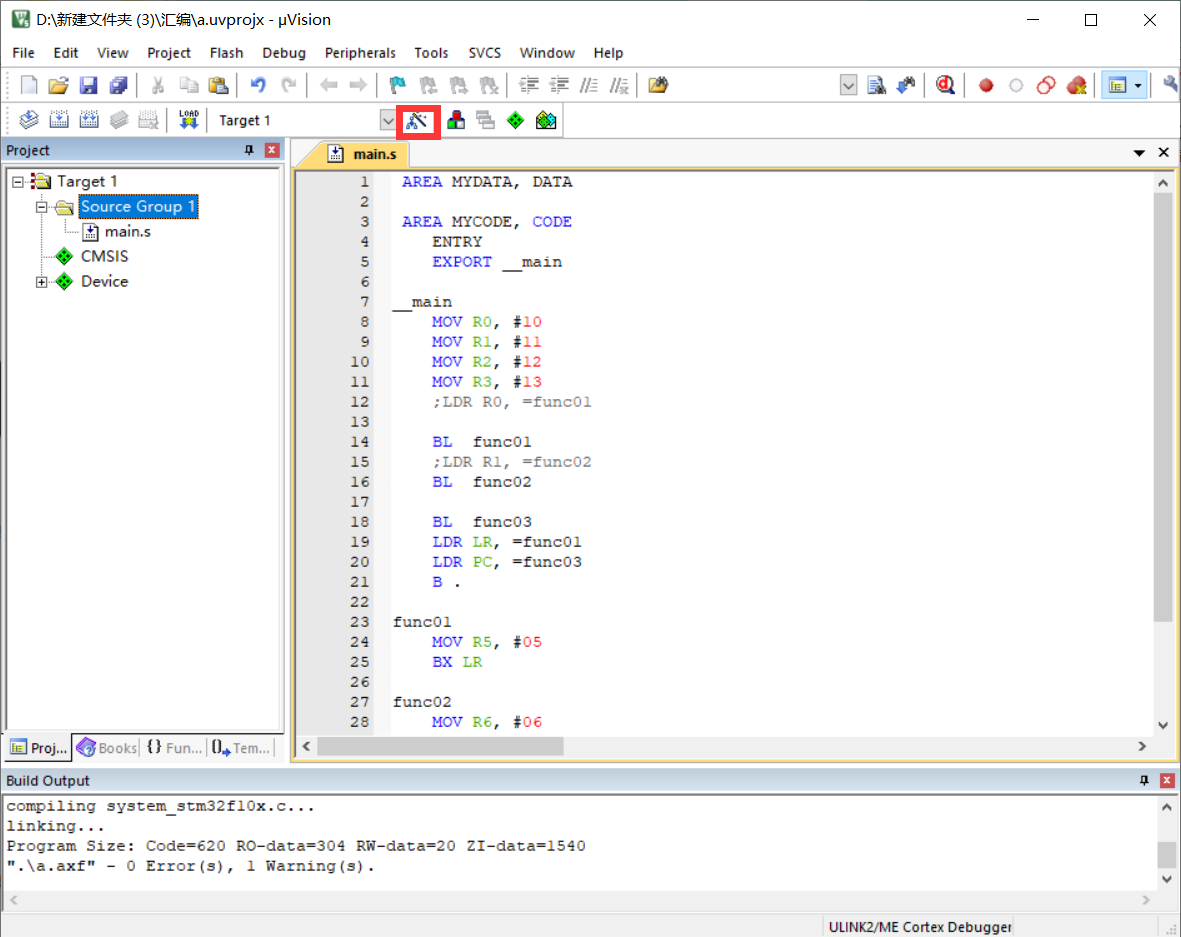
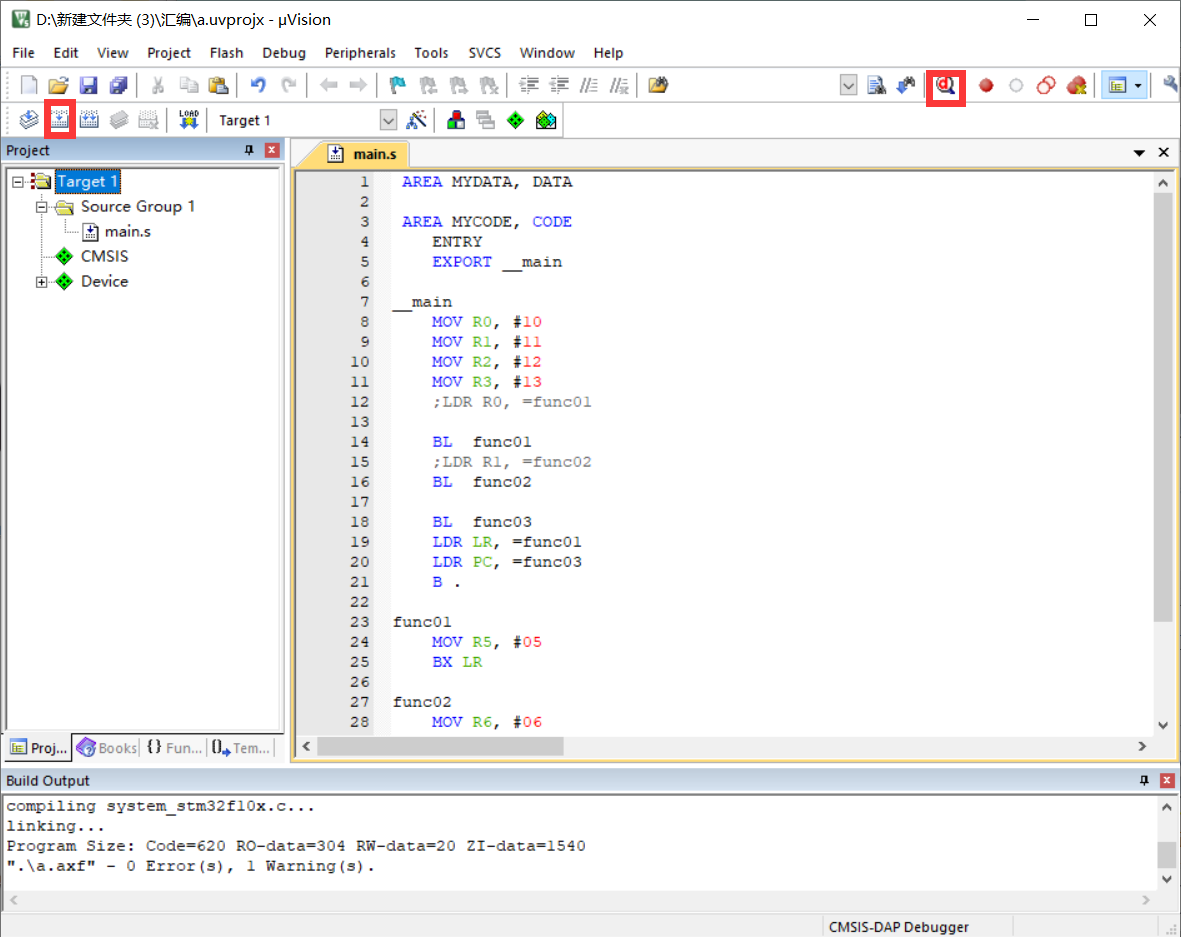
(1) 源码
- 编译并调试如下代码;
AREA MYDATA, DATA
AREA MYCODE, CODE
ENTRY
EXPORT __main
__main
MOV R0, #10
MOV R1, #11
MOV R2, #12
MOV R3, #13
;LDR R0, =func01
BL func01
;LDR R1, =func02
BL func02
BL func03
LDR LR, =func01
LDR PC, =func03
B .
func01
MOV R5, #05
BX LR
func02
MOV R6, #06
BX LR
func03
MOV R7, #07
MOV R8, #08
BX LR
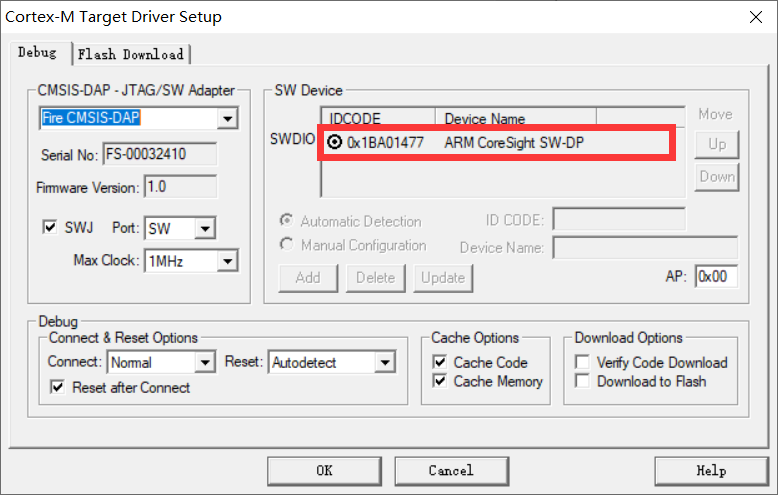
(2) 仿真器设置
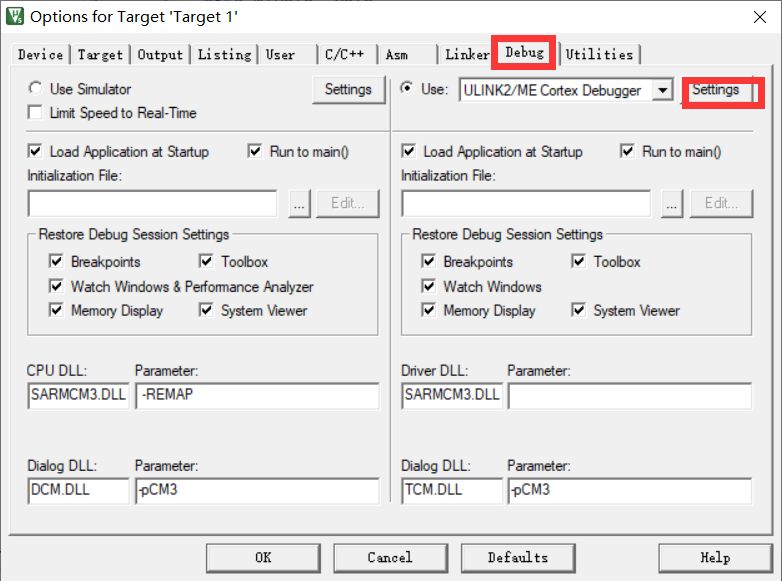
- 根据自己的硬件选择,成功后如下图:
(3) 编译调试
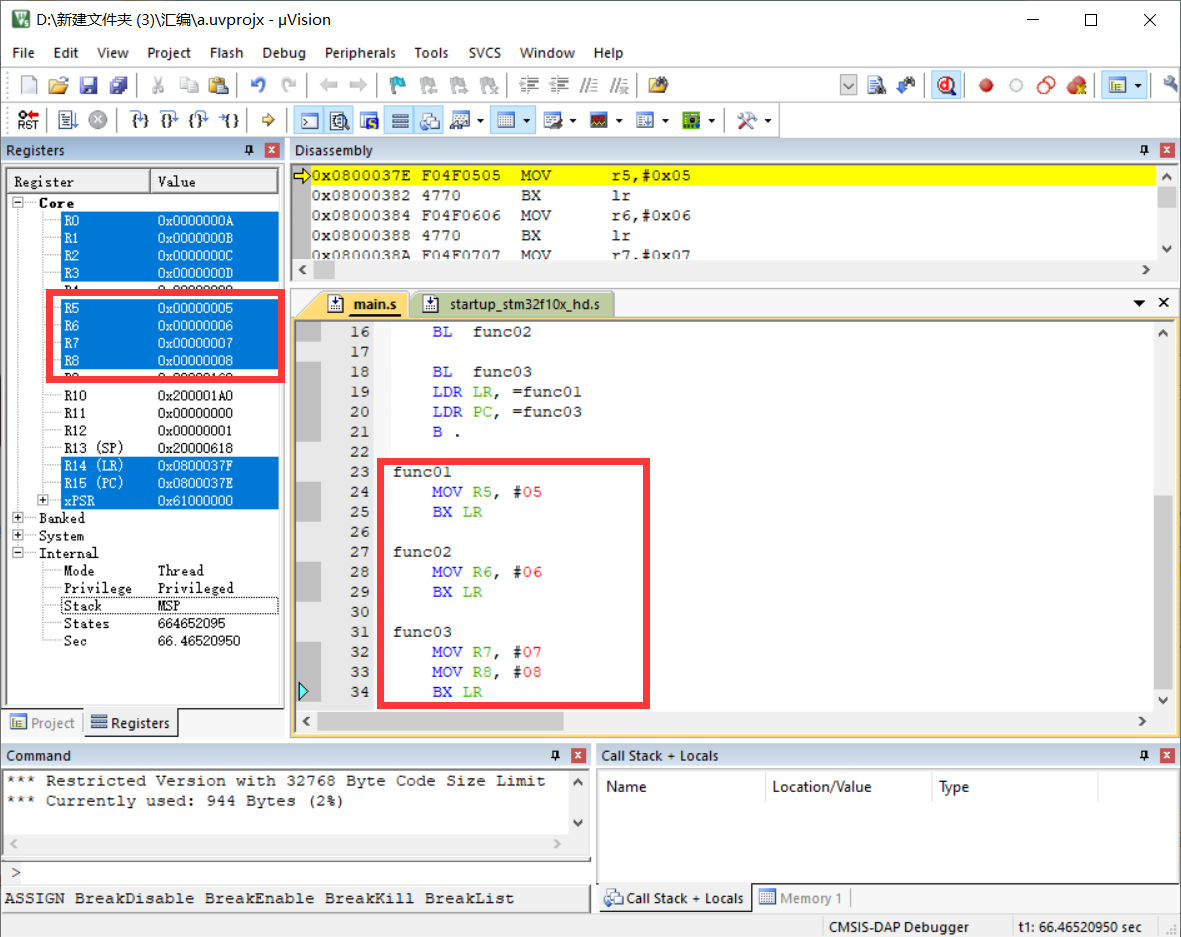
- 编译(左),调试(右)
- 调试完成,代码正确
3 汇编程序
led闪烁:
用汇编程序完成 每间隔1秒钟闪烁一次LED的程序。
参考自
LED0 EQU 0x422101a0 (0x40011004)
RCC_APB2ENR EQU 0x40021018
GPIOA_CRH EQU 0x40010804
Stack_Size EQU 0x00000400
AREA STACK, NOINIT, READWRITE, ALIGN=3
Stack_Mem SPACE Stack_Size
__initial_sp
AREA RESET, DATA, READONLY
__Vectors DCD __initial_sp ; Top of Stack
DCD Reset_Handler ; Reset Handler
AREA |.text|, CODE, READONLY
THUMB
REQUIRE8
PRESERVE8
ENTRY
Reset_Handler
BL LED_Init
MainLoop BL LED_ON
BL Delay
BL LED_OFF
BL Delay
B MainLoop
LED_Init
PUSH {R0,R1, LR}
LDR R0,=RCC_APB2ENR
ORR R0,R0,#0x04
LDR R1,=RCC_APB2ENR
STR R0,[R1]
LDR R0,=GPIOA_CRH
BIC R0,R0,#0x0F
LDR R1,=GPIOA_CRH
STR R0,[R1]
LDR R0,=GPIOA_CRH
ORR R0,R0,#0x03
LDR R1,=GPIOA_CRH
STR R0,[R1]
MOV R0,#1
LDR R1,=LED0
STR R0,[R1]
POP {R0,R1,PC}
LED_ON
PUSH {R0,R1, LR}
MOV R0,#0
LDR R1,=LED0
STR R0,[R1]
POP {R0,R1,PC}
LED_OFF
PUSH {R0,R1, LR}
MOV R0,#1
LDR R1,=LED0
STR R0,[R1]
POP {R0,R1,PC}
Delay
PUSH {R0,R1, LR}
MOVS R0,#0
MOVS R1,#0
MOVS R2,#0
DelayLoop0
ADDS R0,R0,#1
CMP R0,#330
BCC DelayLoop0
MOVS R0,#0
ADDS R1,R1,#1
CMP R1,#330
BCC DelayLoop0
MOVS R0,#0
MOVS R1,#0
ADDS R2,R2,#1
CMP R2,#15
BCC DelayLoop0
POP {R0,R1,PC}
; NOP
END
- 下载运行
4 总结
这次实验主要学习了三种不同的boot模式,还有汇编程序的基本语法,及如何用汇编程序写出简单的小程序。
最后
以上就是欢呼煎蛋最近收集整理的关于嵌入式作业(八):stm32汇编设计0任务要求1 stm32的三种boot模式2 keil下的汇编编程3 汇编程序4 总结的全部内容,更多相关嵌入式作业(八):stm32汇编设计0任务要求1内容请搜索靠谱客的其他文章。








发表评论 取消回复