门禁控制系统的设计
本次作业采用matlab中的simulink来进行仿真,用stateflow来画状态机,用matlab自动生成C代码。
门禁控制系统的输入信号包括:
起落杆位置传感器:有两个位置值信号(升起/落下)
升起位置传感器:输入为1表示在升起位置,输入为0表示不在升起位置,状态图用sqwzcgq来表示。
下降位置传感器:输入为1表示在下降位置,输入为0表示不再下降位置,状态图用xlwzcgq来表示。
汽车入闸传感器:有两个值(True/False)输入为1表示汽车入闸,状态图用rzcgq来表示。
汽车出闸传感器:有两个值(True/False)输入为1表示汽车出闸,状态图用czcgq来表示。
门禁控制系统的输出信号包括:
起落杆电机控制信号:(上升/下降)升起控制信号sckzxh:输出为1控制电机上升,输出为0控制电机不转。
下降控制信号xjkzxh:输出为1控制电机下降,输出为0控制电机不转。
通行灯信号:(红灯/绿灯)红灯信号xhdhong:输出为1,红灯亮,绿灯信号xhdlv:输出为1,绿灯亮。
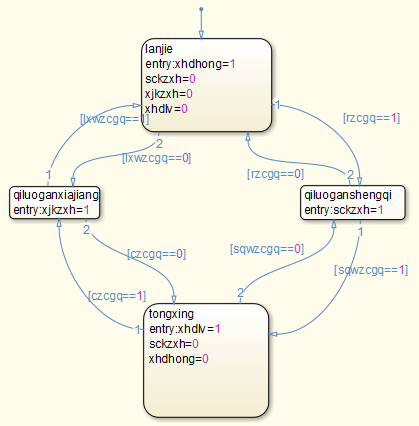
一辆汽车的通过流程为:
起落杆处于落下状态,通行灯为红灯。
汽车进入门禁系统,入闸传感器值变为True。
控制起落杆上升,直到起落杆位置传感器到达升起位置。
通行灯为绿灯。
汽车离开门禁,触发汽车出闸传感器值为True。
控制起落杆下降,直到起落杆位置传感器到达落下位置。
通行灯变为红灯。
转化为状态图为:
Matlab生成的程序代码,只粘贴出来了C文件和头文件,其他文件未粘贴出来
| 2 | * sskzrje.c | ||
| 3 | * | ||
| 4 | * Code generation for model "sskzrje". | ||
| 5 | * | ||
| 6 | * Model version : 1.10 | ||
| 7 | * Simulink Coder version : 8.7 (R2014b) 08-Sep-2014 | ||
| 8 | * C source code generated on : Tue Dec 06 15:56:35 2016 | ||
| 9 | * | ||
| 10 | * Target selection: grt.tlc | ||
| 11 | * Note: GRT includes extra infrastructure and instrumentation for prototyping | ||
| 12 | * Embedded hardware selection: 32-bit Generic | ||
| 13 | * Code generation objectives: Unspecified | ||
| 14 | * Validation result: Not run | ||
| 15 | */ | ||
| 16 | #include "sskzrje.h" | ||
| 17 | #include "sskzrje_private.h" | ||
| 18 | |||
| 19 | /* Named constants for Chart: '<Root>/Chart' */ | ||
| 20 | #define sskzrje_IN_NO_ACTIVE_CHILD ((uint8_T)0U) | ||
| 21 | #define sskzrje_IN_lanjie ((uint8_T)1U) | ||
| 22 | #define sskzrje_IN_qiluoganshengqi ((uint8_T)2U) | ||
| 23 | #define sskzrje_IN_qiluoganxiajiang ((uint8_T)3U) | ||
| 24 | #define sskzrje_IN_tongxing ((uint8_T)4U) | ||
| 25 | |||
| 26 | /* Block states (auto storage) */ | ||
| 27 | DW_sskzrje_T sskzrje_DW; | ||
| 28 | |||
| 29 | /* Real-time model */ | ||
| 30 | RT_MODEL_sskzrje_T sskzrje_M_; | ||
| 31 | RT_MODEL_sskzrje_T *const sskzrje_M = &sskzrje_M_; | ||
| 32 | |||
| 33 | /* Model step function */ | ||
| 34 | void sskzrje_step(void) | ||
| 35 | { | ||
| 36 | real_T rtb_ManualSwitch; | ||
| 37 | real_T rtb_ManualSwitch1; | ||
| 38 | real_T rtb_ManualSwitch2; | ||
| 39 | real_T rtb_ManualSwitch3; | ||
| 40 | |||
| 41 | /* ManualSwitch: '<Root>/Manual Switch' incorporates: | ||
| 42 | * Constant: '<Root>/constant' | ||
| 43 | * Constant: '<Root>/constant1' | ||
| 44 | */ | ||
| 45 | if (sskzrje_P.ManualSwitch_CurrentSetting == 1) { | ||
| 46 | rtb_ManualSwitch = sskzrje_P.constant_Value; | ||
| 47 | } else { | ||
| 48 | rtb_ManualSwitch = sskzrje_P.constant1_Value; | ||
| 49 | } | ||
| 50 | |||
| 51 | /* End of ManualSwitch: '<Root>/Manual Switch' */ | ||
| 52 | |||
| 53 | /* ManualSwitch: '<Root>/Manual Switch1' incorporates: | ||
| 54 | * Constant: '<Root>/constant' | ||
| 55 | * Constant: '<Root>/constant1' | ||
| 56 | */ | ||
| 57 | if (sskzrje_P.ManualSwitch1_CurrentSetting == 1) { | ||
| 58 | rtb_ManualSwitch1 = sskzrje_P.constant_Value; | ||
| 59 | } else { | ||
| 60 | rtb_ManualSwitch1 = sskzrje_P.constant1_Value; | ||
| 61 | } | ||
| 62 | |||
| 63 | /* End of ManualSwitch: '<Root>/Manual Switch1' */ | ||
| 64 | |||
| 65 | /* ManualSwitch: '<Root>/Manual Switch2' incorporates: | ||
| 66 | * Constant: '<Root>/constant' | ||
| 67 | * Constant: '<Root>/constant1' | ||
| 68 | */ | ||
| 69 | if (sskzrje_P.ManualSwitch2_CurrentSetting == 1) { | ||
| 70 | rtb_ManualSwitch2 = sskzrje_P.constant_Value; | ||
| 71 | } else { | ||
| 72 | rtb_ManualSwitch2 = sskzrje_P.constant1_Value; | ||
| 73 | } | ||
| 74 | |||
| 75 | /* End of ManualSwitch: '<Root>/Manual Switch2' */ | ||
| 76 | |||
| 77 | /* ManualSwitch: '<Root>/Manual Switch3' incorporates: | ||
| 78 | * Constant: '<Root>/constant' | ||
| 79 | * Constant: '<Root>/constant1' | ||
| 80 | */ | ||
| 81 | if (sskzrje_P.ManualSwitch3_CurrentSetting == 1) { | ||
| 82 | rtb_ManualSwitch3 = sskzrje_P.constant_Value; | ||
| 83 | } else { | ||
| 84 | rtb_ManualSwitch3 = sskzrje_P.constant1_Value; | ||
| 85 | } | ||
| 86 | |||
| 87 | /* End of ManualSwitch: '<Root>/Manual Switch3' */ | ||
| 88 | |||
| 89 | /* Chart: '<Root>/Chart' */ | ||
| 90 | /* Gateway: Chart */ | ||
| 91 | /* During: Chart */ | ||
| 92 | if (sskzrje_DW.is_active_c3_sskzrje == 0U) { | ||
| 93 | /* Entry: Chart */ | ||
| 94 | sskzrje_DW.is_active_c3_sskzrje = 1U; | ||
| 95 | |||
| 96 | /* Entry Internal: Chart */ | ||
| 97 | /* Transition: '<S1>:6' */ | ||
| 98 | sskzrje_DW.is_c3_sskzrje = sskzrje_IN_lanjie; | ||
| 99 | |||
| 100 | /* Entry 'lanjie': '<S1>:1' */ | ||
| 101 | } else { | ||
| 102 | switch (sskzrje_DW.is_c3_sskzrje) { | ||
| 103 | case sskzrje_IN_lanjie: | ||
| 104 | /* During 'lanjie': '<S1>:1' */ | ||
| 105 | if (rtb_ManualSwitch == 1.0) { | ||
| 106 | /* Transition: '<S1>:3' */ | ||
| 107 | sskzrje_DW.is_c3_sskzrje = sskzrje_IN_qiluoganshengqi; | ||
| 108 | |||
| 109 | /* Entry 'qiluoganshengqi': '<S1>:2' */ | ||
| 110 | } else { | ||
| 111 | if (rtb_ManualSwitch2 == 0.0) { | ||
| 112 | /* Transition: '<S1>:25' */ | ||
| 113 | sskzrje_DW.is_c3_sskzrje = sskzrje_IN_qiluoganxiajiang; | ||
| 114 | |||
| 115 | /* Entry 'qiluoganxiajiang': '<S1>:16' */ | ||
| 116 | } | ||
| 117 | } | ||
| 118 | break; | ||
| 119 | |||
| 120 | case sskzrje_IN_qiluoganshengqi: | ||
| 121 | /* During 'qiluoganshengqi': '<S1>:2' */ | ||
| 122 | if (rtb_ManualSwitch3 == 1.0) { | ||
| 123 | /* Transition: '<S1>:15' */ | ||
| 124 | sskzrje_DW.is_c3_sskzrje = sskzrje_IN_tongxing; | ||
| 125 | |||
| 126 | /* Entry 'tongxing': '<S1>:14' */ | ||
| 127 | } else { | ||
| 128 | if (rtb_ManualSwitch == 0.0) { | ||
| 129 | /* Transition: '<S1>:22' */ | ||
| 130 | sskzrje_DW.is_c3_sskzrje = sskzrje_IN_lanjie; | ||
| 131 | |||
| 132 | /* Entry 'lanjie': '<S1>:1' */ | ||
| 133 | } | ||
| 134 | } | ||
| 135 | break; | ||
| 136 | |||
| 137 | case sskzrje_IN_qiluoganxiajiang: | ||
| 138 | /* During 'qiluoganxiajiang': '<S1>:16' */ | ||
| 139 | if (rtb_ManualSwitch2 == 1.0) { | ||
| 140 | /* Transition: '<S1>:18' */ | ||
| 141 | sskzrje_DW.is_c3_sskzrje = sskzrje_IN_lanjie; | ||
| 142 | |||
| 143 | /* Entry 'lanjie': '<S1>:1' */ | ||
| 144 | } else { | ||
| 145 | if (rtb_ManualSwitch1 == 0.0) { | ||
| 146 | /* Transition: '<S1>:24' */ | ||
| 147 | sskzrje_DW.is_c3_sskzrje = sskzrje_IN_tongxing; | ||
| 148 | |||
| 149 | /* Entry 'tongxing': '<S1>:14' */ | ||
| 150 | } | ||
| 151 | } | ||
| 152 | break; | ||
| 153 | |||
| 154 | default: | ||
| 155 | /* During 'tongxing': '<S1>:14' */ | ||
| 156 | if (rtb_ManualSwitch1 == 1.0) { | ||
| 157 | /* Transition: '<S1>:17' */ | ||
| 158 | sskzrje_DW.is_c3_sskzrje = sskzrje_IN_qiluoganxiajiang; | ||
| 159 | |||
| 160 | /* Entry 'qiluoganxiajiang': '<S1>:16' */ | ||
| 161 | } else { | ||
| 162 | if (rtb_ManualSwitch3 == 0.0) { | ||
| 163 | /* Transition: '<S1>:23' */ | ||
| 164 | sskzrje_DW.is_c3_sskzrje = sskzrje_IN_qiluoganshengqi; | ||
| 165 | |||
| 166 | /* Entry 'qiluoganshengqi': '<S1>:2' */ | ||
| 167 | } | ||
| 168 | } | ||
| 169 | break; | ||
| 170 | } | ||
| 171 | } | ||
| 172 | |||
| 173 | /* End of Chart: '<Root>/Chart' */ | ||
| 174 | |||
| 175 | /* Matfile logging */ | ||
| 176 | rt_UpdateTXYLogVars(sskzrje_M->rtwLogInfo, (&sskzrje_M->Timing.taskTime0)); | ||
| 177 | |||
| 178 | /* signal main to stop simulation */ | ||
| 179 | { /* Sample time: [0.2s, 0.0s] */ | ||
| 180 | if ((rtmGetTFinal(sskzrje_M)!=-1) && | ||
| 181 | !((rtmGetTFinal(sskzrje_M)-sskzrje_M->Timing.taskTime0) > | ||
| 182 | sskzrje_M->Timing.taskTime0 * (DBL_EPSILON))) { | ||
| 183 | rtmSetErrorStatus(sskzrje_M, "Simulation finished"); | ||
| 184 | } | ||
| 185 | } | ||
| 186 | |||
| 187 | /* Update absolute time for base rate */ | ||
| 188 | /* The "clockTick0" counts the number of times the code of this task has | ||
| 189 | * been executed. The absolute time is the multiplication of "clockTick0" | ||
| 190 | * and "Timing.stepSize0". Size of "clockTick0" ensures timer will not | ||
| 191 | * overflow during the application lifespan selected. | ||
| 192 | * Timer of this task consists of two 32 bit unsigned integers. | ||
| 193 | * The two integers represent the low bits Timing.clockTick0 and the high bits | ||
| 194 | * Timing.clockTickH0. When the low bit overflows to 0, the high bits increment. | ||
| 195 | */ | ||
| 196 | if (!(++sskzrje_M->Timing.clockTick0)) { | ||
| 197 | ++sskzrje_M->Timing.clockTickH0; | ||
| 198 | } | ||
| 199 | |||
| 200 | sskzrje_M->Timing.taskTime0 = sskzrje_M->Timing.clockTick0 * | ||
| 201 | sskzrje_M->Timing.stepSize0 + sskzrje_M->Timing.clockTickH0 * | ||
| 202 | sskzrje_M->Timing.stepSize0 * 4294967296.0; | ||
| 203 | } | ||
| 204 | |||
| 205 | /* Model initialize function */ | ||
| 206 | void sskzrje_initialize(void) | ||
| 207 | { | ||
| 208 | /* Registration code */ | ||
| 209 | |||
| 210 | /* initialize non-finites */ | ||
| 211 | rt_InitInfAndNaN(sizeof(real_T)); | ||
| 212 | |||
| 213 | /* initialize real-time model */ | ||
| 214 | (void) memset((void *)sskzrje_M, 0, | ||
| 215 | sizeof(RT_MODEL_sskzrje_T)); | ||
| 216 | rtmSetTFinal(sskzrje_M, 10.0); | ||
| 217 | sskzrje_M->Timing.stepSize0 = 0.2; | ||
| 218 | |||
| 219 | /* Setup for data logging */ | ||
| 220 | { | ||
| 221 | static RTWLogInfo rt_DataLoggingInfo; | ||
| 222 | sskzrje_M->rtwLogInfo = &rt_DataLoggingInfo; | ||
| 223 | } | ||
| 224 | |||
| 225 | /* Setup for data logging */ | ||
| 226 | { | ||
| 227 | rtliSetLogXSignalInfo(sskzrje_M->rtwLogInfo, (NULL)); | ||
| 228 | rtliSetLogXSignalPtrs(sskzrje_M->rtwLogInfo, (NULL)); | ||
| 229 | rtliSetLogT(sskzrje_M->rtwLogInfo, "tout"); | ||
| 230 | rtliSetLogX(sskzrje_M->rtwLogInfo, ""); | ||
| 231 | rtliSetLogXFinal(sskzrje_M->rtwLogInfo, ""); | ||
| 232 | rtliSetLogVarNameModifier(sskzrje_M->rtwLogInfo, "rt_"); | ||
| 233 | rtliSetLogFormat(sskzrje_M->rtwLogInfo, 0); | ||
| 234 | rtliSetLogMaxRows(sskzrje_M->rtwLogInfo, 1000); | ||
| 235 | rtliSetLogDecimation(sskzrje_M->rtwLogInfo, 1); | ||
| 236 | rtliSetLogY(sskzrje_M->rtwLogInfo, ""); | ||
| 237 | rtliSetLogYSignalInfo(sskzrje_M->rtwLogInfo, (NULL)); | ||
| 238 | rtliSetLogYSignalPtrs(sskzrje_M->rtwLogInfo, (NULL)); | ||
| 239 | } | ||
| 240 | |||
| 241 | /* states (dwork) */ | ||
| 242 | (void) memset((void *)&sskzrje_DW, 0, | ||
| 243 | sizeof(DW_sskzrje_T)); | ||
| 244 | |||
| 245 | /* Matfile logging */ | ||
| 246 | rt_StartDataLoggingWithStartTime(sskzrje_M->rtwLogInfo, 0.0, rtmGetTFinal | ||
| 247 | (sskzrje_M), sskzrje_M->Timing.stepSize0, (&rtmGetErrorStatus(sskzrje_M))); | ||
| 248 | |||
| 249 | /* InitializeConditions for Chart: '<Root>/Chart' */ | ||
| 250 | sskzrje_DW.is_active_c3_sskzrje = 0U; | ||
| 251 | sskzrje_DW.is_c3_sskzrje = sskzrje_IN_NO_ACTIVE_CHILD; | ||
| 252 | } | ||
| 253 | |||
| 254 | /* Model terminate function */ | ||
| 255 | void sskzrje_terminate(void) | ||
| 256 | { | ||
| 257 | /* (no terminate code required) */ | ||
| 258 | } | ||
| 259 | |||
| /* | |||
| 2 | * sskzrje.h | ||
| 3 | * | ||
| 4 | * Code generation for model "sskzrje". | ||
| 5 | * | ||
| 6 | * Model version : 1.10 | ||
| 7 | * Simulink Coder version : 8.7 (R2014b) 08-Sep-2014 | ||
| 8 | * C source code generated on : Tue Dec 06 15:56:35 2016 | ||
| 9 | * | ||
| 10 | * Target selection: grt.tlc | ||
| 11 | * Note: GRT includes extra infrastructure and instrumentation for prototyping | ||
| 12 | * Embedded hardware selection: 32-bit Generic | ||
| 13 | * Code generation objectives: Unspecified | ||
| 14 | * Validation result: Not run | ||
| 15 | */ | ||
| 16 | #ifndef RTW_HEADER_sskzrje_h_ | ||
| 17 | #define RTW_HEADER_sskzrje_h_ | ||
| 18 | #include <float.h> | ||
| 19 | #include <string.h> | ||
| 20 | #include <stddef.h> | ||
| 21 | #ifndef sskzrje_COMMON_INCLUDES_ | ||
| 22 | # define sskzrje_COMMON_INCLUDES_ | ||
| 23 | #include "rtwtypes.h" | ||
| 24 | #include "rtw_continuous.h" | ||
| 25 | #include "rtw_solver.h" | ||
| 26 | #include "rt_logging.h" | ||
| 27 | #endif /* sskzrje_COMMON_INCLUDES_ */ | ||
| 28 | |||
| 29 | #include "sskzrje_types.h" | ||
| 30 | |||
| 31 | /* Shared type includes */ | ||
| 32 | #include "multiword_types.h" | ||
| 33 | #include "rt_nonfinite.h" | ||
| 34 | |||
| 35 | /* Macros for accessing real-time model data structure */ | ||
| 36 | #ifndef rtmGetFinalTime | ||
| 37 | # define rtmGetFinalTime(rtm) ((rtm)->Timing.tFinal) | ||
| 38 | #endif | ||
| 39 | |||
| 40 | #ifndef rtmGetRTWLogInfo | ||
| 41 | # define rtmGetRTWLogInfo(rtm) ((rtm)->rtwLogInfo) | ||
| 42 | #endif | ||
| 43 | |||
| 44 | #ifndef rtmGetErrorStatus | ||
| 45 | # define rtmGetErrorStatus(rtm) ((rtm)->errorStatus) | ||
| 46 | #endif | ||
| 47 | |||
| 48 | #ifndef rtmSetErrorStatus | ||
| 49 | # define rtmSetErrorStatus(rtm, val) ((rtm)->errorStatus = (val)) | ||
| 50 | #endif | ||
| 51 | |||
| 52 | #ifndef rtmGetStopRequested | ||
| 53 | # define rtmGetStopRequested(rtm) ((rtm)->Timing.stopRequestedFlag) | ||
| 54 | #endif | ||
| 55 | |||
| 56 | #ifndef rtmSetStopRequested | ||
| 57 | # define rtmSetStopRequested(rtm, val) ((rtm)->Timing.stopRequestedFlag = (val)) | ||
| 58 | #endif | ||
| 59 | |||
| 60 | #ifndef rtmGetStopRequestedPtr | ||
| 61 | # define rtmGetStopRequestedPtr(rtm) (&((rtm)->Timing.stopRequestedFlag)) | ||
| 62 | #endif | ||
| 63 | |||
| 64 | #ifndef rtmGetT | ||
| 65 | # define rtmGetT(rtm) ((rtm)->Timing.taskTime0) | ||
| 66 | #endif | ||
| 67 | |||
| 68 | #ifndef rtmGetTFinal | ||
| 69 | # define rtmGetTFinal(rtm) ((rtm)->Timing.tFinal) | ||
| 70 | #endif | ||
| 71 | |||
| 72 | /* Block states (auto storage) for system '<Root>' */ | ||
| 73 | typedef struct { | ||
| 74 | uint8_T is_active_c3_sskzrje; /* '<Root>/Chart' */ | ||
| 75 | uint8_T is_c3_sskzrje; /* '<Root>/Chart' */ | ||
| 76 | } DW_sskzrje_T; | ||
| 77 | |||
| 78 | /* Parameters (auto storage) */ | ||
| 79 | struct P_sskzrje_T_ { | ||
| 80 | real_T constant_Value; /* Expression: 1 | ||
| 81 | * Referenced by: '<Root>/constant' | ||
| 82 | */ | ||
| 83 | real_T constant1_Value; /* Expression: 0 | ||
| 84 | * Referenced by: '<Root>/constant1' | ||
| 85 | */ | ||
| 86 | uint8_T ManualSwitch_CurrentSetting; /* Computed Parameter: ManualSwitch_CurrentSetting | ||
| 87 | * Referenced by: '<Root>/Manual Switch' | ||
| 88 | */ | ||
| 89 | uint8_T ManualSwitch1_CurrentSetting;/* Computed Parameter: ManualSwitch1_CurrentSetting | ||
| 90 | * Referenced by: '<Root>/Manual Switch1' | ||
| 91 | */ | ||
| 92 | uint8_T ManualSwitch2_CurrentSetting;/* Computed Parameter: ManualSwitch2_CurrentSetting | ||
| 93 | * Referenced by: '<Root>/Manual Switch2' | ||
| 94 | */ | ||
| 95 | uint8_T ManualSwitch3_CurrentSetting;/* Computed Parameter: ManualSwitch3_CurrentSetting | ||
| 96 | * Referenced by: '<Root>/Manual Switch3' | ||
| 97 | */ | ||
| 98 | }; | ||
| 99 | |||
| 100 | /* Real-time Model Data Structure */ | ||
| 101 | struct tag_RTM_sskzrje_T { | ||
| 102 | const char_T *errorStatus; | ||
| 103 | RTWLogInfo *rtwLogInfo; | ||
| 104 | |||
| 105 | /* | ||
| 106 | * Timing: | ||
| 107 | * The following substructure contains information regarding | ||
| 108 | * the timing information for the model. | ||
| 109 | */ | ||
| 110 | struct { | ||
| 111 | time_T taskTime0; | ||
| 112 | uint32_T clockTick0; | ||
| 113 | uint32_T clockTickH0; | ||
| 114 | time_T stepSize0; | ||
| 115 | time_T tFinal; | ||
| 116 | boolean_T stopRequestedFlag; | ||
| 117 | } Timing; | ||
| 118 | }; | ||
| 119 | |||
| 120 | /* Block parameters (auto storage) */ | ||
| 121 | extern P_sskzrje_T sskzrje_P; | ||
| 122 | |||
| 123 | /* Block states (auto storage) */ | ||
| 124 | extern DW_sskzrje_T sskzrje_DW; | ||
| 125 | |||
| 126 | /* Model entry point functions */ | ||
| 127 | extern void sskzrje_initialize(void); | ||
| 128 | extern void sskzrje_step(void); | ||
| 129 | extern void sskzrje_terminate(void); | ||
| 130 | |||
| 131 | /* Real-time Model object */ | ||
| 132 | extern RT_MODEL_sskzrje_T *const sskzrje_M; | ||
| 133 | |||
| 134 | /*- | ||
| 135 | * The generated code includes comments that allow you to trace directly | ||
| 136 | * back to the appropriate location in the model. The basic format | ||
| 137 | * is <system>/block_name, where system is the system number (uniquely | ||
| 138 | * assigned by Simulink) and block_name is the name of the block. | ||
| 139 | * | ||
| 140 | * Use the MATLAB hilite_system command to trace the generated code back | ||
| 141 | * to the model. For example, | ||
| 142 | * | ||
| 143 | * hilite_system('<S3>') - opens system 3 | ||
| 144 | * hilite_system('<S3>/Kp') - opens and selects block Kp which resides in S3 | ||
| 145 | * | ||
| 146 | * Here is the system hierarchy for this model | ||
| 147 | * | ||
| 148 | * '<Root>' : 'sskzrje' | ||
| 149 | * '<S1>' : 'sskzrje/Chart' | ||
| 150 | */ | ||
| 151 | #endif /* RTW_HEADER_sskzrje_h_ */ | ||
| 152 | |||
| /* | |||
| 2 | * sskzrje_private.h | ||
| 3 | * | ||
| 4 | * Code generation for model "sskzrje". | ||
| 5 | * | ||
| 6 | * Model version : 1.10 | ||
| 7 | * Simulink Coder version : 8.7 (R2014b) 08-Sep-2014 | ||
| 8 | * C source code generated on : Tue Dec 06 15:56:35 2016 | ||
| 9 | * | ||
| 10 | * Target selection: grt.tlc | ||
| 11 | * Note: GRT includes extra infrastructure and instrumentation for prototyping | ||
| 12 | * Embedded hardware selection: 32-bit Generic | ||
| 13 | * Code generation objectives: Unspecified | ||
| 14 | * Validation result: Not run | ||
| 15 | */ | ||
| 16 | #ifndef RTW_HEADER_sskzrje_private_h_ | ||
| 17 | #define RTW_HEADER_sskzrje_private_h_ | ||
| 18 | #include "rtwtypes.h" | ||
| 19 | #include "builtin_typeid_types.h" | ||
| 20 | #include "multiword_types.h" | ||
| 21 | |||
| 22 | /* Private macros used by the generated code to access rtModel */ | ||
| 23 | #ifndef rtmSetTFinal | ||
| 24 | # define rtmSetTFinal(rtm, val) ((rtm)->Timing.tFinal = (val)) | ||
| 25 | #endif | ||
| 26 | |||
| 27 | #ifndef rtmGetTPtr | ||
| 28 | # define rtmGetTPtr(rtm) (&(rtm)->Timing.taskTime0) | ||
| 29 | #endif | ||
| 30 | #endif /* RTW_HEADER_sskzrje_private_h_ */ | ||
| 31 | |||
转载于:https://www.cnblogs.com/shishiruanjiankongzhi/p/6137989.html
最后
以上就是积极大山最近收集整理的关于实时软件系统设计第二次作业的全部内容,更多相关实时软件系统设计第二次作业内容请搜索靠谱客的其他文章。








发表评论 取消回复