我是靠谱客的博主 明亮小笼包,这篇文章主要介绍matlab_迭代学习控制_论文例子1_开环 三种方法方法一、利用simulink的 from to workspace方法二、给定传函转为状态方程方法三、 给定传函转为差分方程,现在分享给大家,希望可以做个参考。
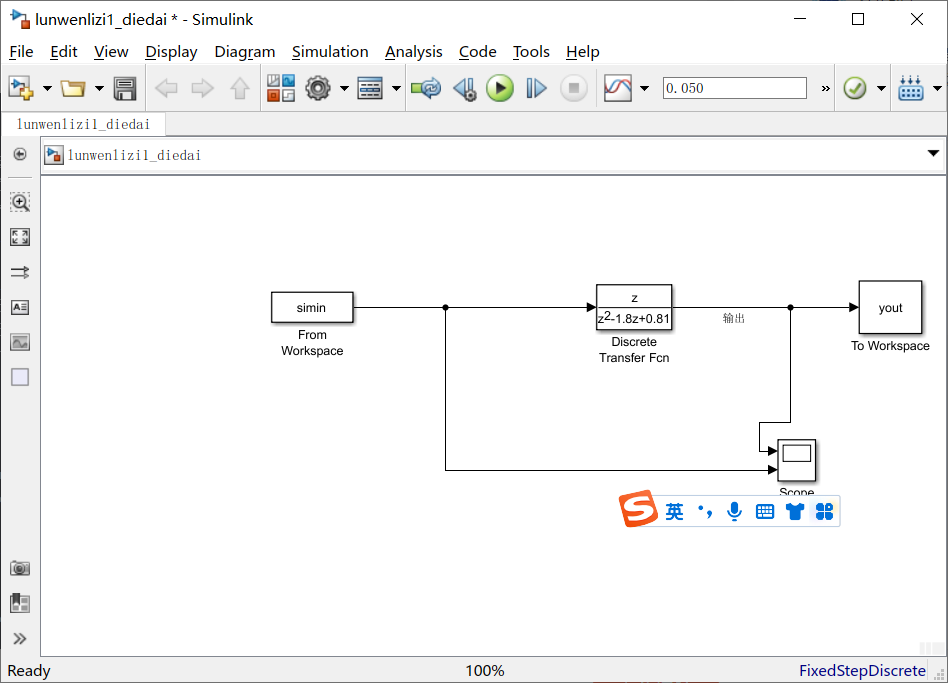
方法一、利用simulink的 from to workspace
clc;
clear;
K=50;
% 每次迭代的时间
J=180;
%总迭代次数
ts=0.001;
%采样时间
t=[0:ts:K*ts]';%仿真时间
yd=sin(2*pi*50*t);
%跟踪轨迹/期望输出
u(1:0.050/ts+1,1)=1; %第一次迭代输入
y_all=[];
%记录所有迭代所有时刻输出
e_all=[];
%记录所有迭代的所有时刻误差
u_all=[];
%记录所有迭代所有时刻输入
for j=1:J
simin=[t,u];
simout=sim('lunwenlizi1_diedai');
y_all=[y_all,yout];
e=yd-yout;
e_all=[e_all,e];
for k=1:K-1
u(k)=u(k)+0.5*e(k+1);
%迭代学习函数
end
u_all=[u_all,u];
end
%绘图观察实验效果
subplot(2,1,1)
plot(1:J,log(e_all(15,:)));
%第十五时刻误差随迭代的变换
subplot(2,1,2)
plot(1:18,y_all(1:18,50),'+');
%第五十次迭代前十八时刻的输出
hold on
plot(1:18,yd(1:18));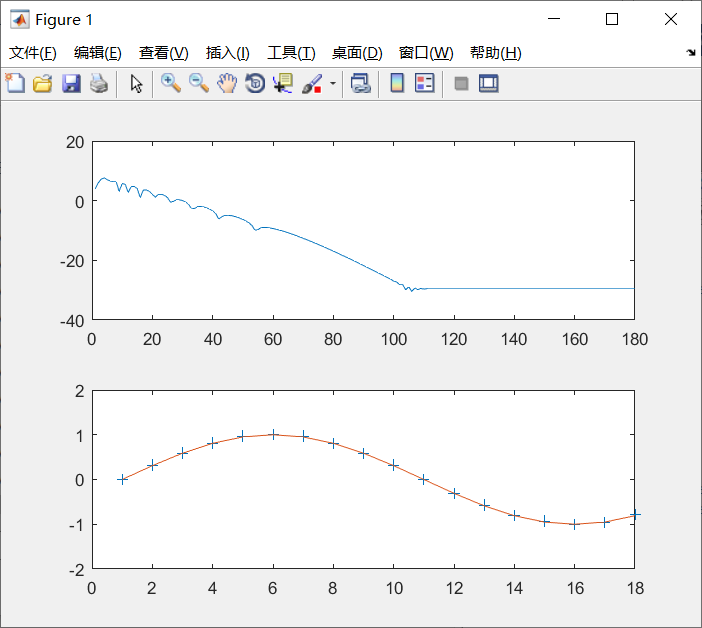
simulink文件:
matlab迭代学习控制论文中的例子三种方法-机器学习文档类资源-CSDN下载
方法二、给定传函转为状态方程
%%迭代学习控制论文中的例子一。给定离散传函转为状态方程。
%% P型学习算法
clc;
%求离散传函的状态空间表达式
num=[1 0];
den=conv([1 -0.9],[1 -0.9]);
P=tf(num,den,1)
%离散传递函数,设采样时间为1
[A,B,C,D]=tf2ss(num,den);
x1=[];
%两个状态变量
x2=[];
u=[];
e=[];
yd=[];
y=[];
%初始化
T=50;
%时间
J=100;
%迭代次数
x1(1:J,1)=[0];
x2(1:J,1)=[0];
u(1,1:T+1)=1;
yd=[];
lp=0.5;
%迭代学习控制渐进稳定判别准则一:q0*(1-l0*p1)=1*(1-0.5*1)=0.5<1
for j = 1:J
for k=1:T+1
%状态空间
x = A*[x1(j,k);x2(j,k)]+B*u(j,k);
%%!一个式子左边不可以同时赋两个变量
x1(j,k+1)=x(1,:);
x2(j,k+1)=x(2,:);
y(j,k)=C*[x1(j,k);x2(j,k)]+D*u(j,k);
yd(j,k)=1-exp(-k);
%跟踪轨迹
end
for k=1:T
%迭代学习
e(j,k+1)=yd(j,k+1)-y(j,k+1);
u(j+1,k)=u(j,k) + lp * e(j,k+1);
end
end
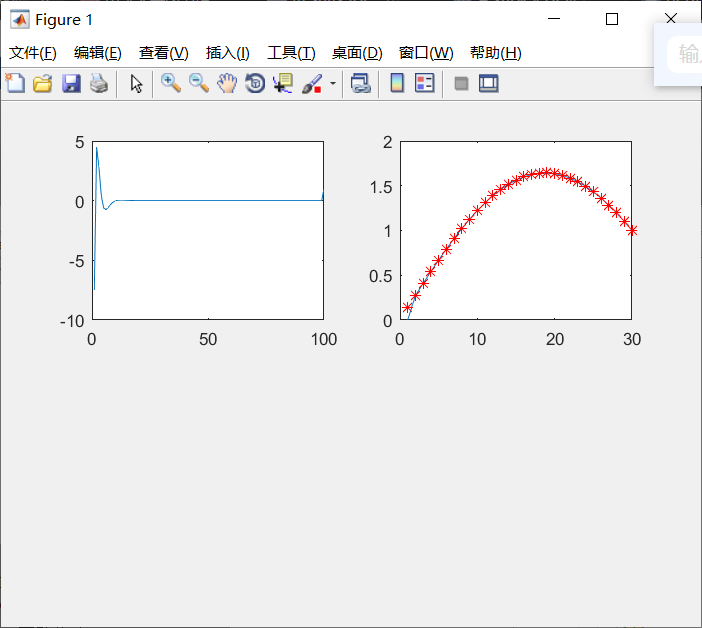
subplot(2,2,1)
plot(1:J,log10(abs(e(1:J,30))));
%观察第30s误差随迭代次数的变化
xlabel('j');ylabel('abs(e)');
subplot(2,2,2)
plot(1:0.6*T,y(80,1:0.6*T));
%观察第80次迭代,前30s内的输出
hold on
plot(1:0.6*T,yd(80,1:0.6*T),'r*');
xlabel('k');ylabel('y,yd');
% %%迭代学习控制论文中的例子一
给离散传函转为状态方程
% %% P型
% clc;
% N=100;
% x1=ones(N,N);
%%状态 x是二维的,得设两个变量
% x2=ones(N,N);
% u=ones(N,N);
% e=ones(N,N);
% yd=ones(N,N);
% y=ones(N,N);
%
% A = [0,1;
%
-0.81,1.8];
% B = [0;
%
1];
% C = [0,1];
% D = 0;
%%%??????D若有值就发散了。。。。。
% [num,den]=ss2tf(A,B,C,D)
% p1=tf(num,den);
% 连续传函
% P2=tf(num,den,1)
% 离散传函
p0=0.6 p1=0.51
%
% x1(:,1)=[0];
% x2(:,1)=[0];
%
u(:,1)=1;
%
lp=0.5;
%迭代学习控制判别准则 q0*(1-l0p1)=1*(1-1.25*0.51)=0.3625
%
%
% for j = 1:N-1
% for k=1:30
%
x = A*[x1(j,k);x2(j,k)]+B*u(j,k);
%%!一个式子左边不可以同时赋两个变量
%
x1(j,k+1)=x(1,:);
%
x2(j,k+1)=x(2,:);
%
y(j,k)=C*[x1(j,k);x2(j,k)]+D*u(j,k);
%
yd(j,k)=0.5.*sin(0.06.*(k))+1.2.*sin(0.09.*(k));
% end
% for k=1:30
%
e(j,k+1)=yd(j,k+1)-y(j,k+1);
%
u(j+1,k)=u(j,k) + lp * e(j,k+1);
% end
% end
%
% k=1:30;
% subplot(2,2,1)
% plot(1:N,e(1:N,5));
% subplot(2,2,2)
% plot(k,y(99,1:30));
% hold on
% plot(k,yd(99,1:30),'r*');num =
0 1 0
den =1.0000 -1.8000 0.8100
P2 =
z
------------------
z^2 - 1.8 z + 0.81
Sample time: 1 seconds
Discrete-time transfer function.
方法三、 给定传函转为差分方程
不如转为状态方程
% 迭代学习控制
%论文中的例子,系统为离散传递函数,有两个疑问。
%初值
u=ones(181,100);
e=ones(181,100);
yd=ones(181,100);
y=ones(181,100);
y(:,1)=1;
y(:,2)=2.8;%%????初始值通过传递函数算出来的,为什么差分方程算出来不一致?
% 系统
for j=1:180
for k=1:90
y(j,k+2)=1.8*(y(j,k+1))-0.81*y(j,k)+u(j,k+1);
end
for k=1:90
e(j,k+1)=yd(j,k+1)-y(j,k+1);
u(j+1,k)=u(j,k)+0.5*e(j,k+1);
end
end
j=1:181;k=1:100;
subplot(2,2,1)
stairs(k,y(30,:))
subplot(2,2,2)
stairs(j,log10(e(:,30)))
uu=ones(181,100);
num=[1,0];
den=[1 -1.8 0.81];
yy=filter(num,den,uu(1,:));
subplot(2,2,3)
stairs(k,yy)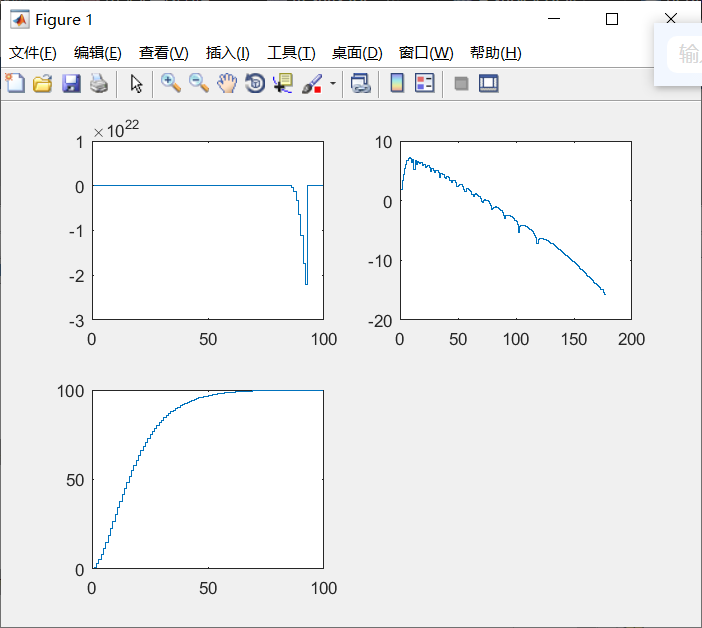
最后
以上就是明亮小笼包最近收集整理的关于matlab_迭代学习控制_论文例子1_开环 三种方法方法一、利用simulink的 from to workspace方法二、给定传函转为状态方程方法三、 给定传函转为差分方程的全部内容,更多相关matlab_迭代学习控制_论文例子1_开环内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复