MDC300

接口
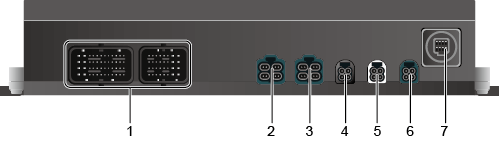
- 低速连接器 (接口型号 座MOLEX/502225-0801 MOLEX/64320-1319,线MOLEX/64319-3211)
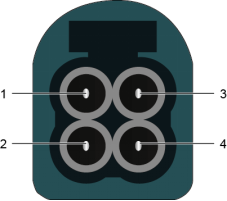
- 四合一车载以太连接器1
- 四合一车载以太连接器2 (接口型号 座Rosenberger/E6S20D-40MT5-Z 线Rosenberger/E6K10D-1CAZ5-Z)
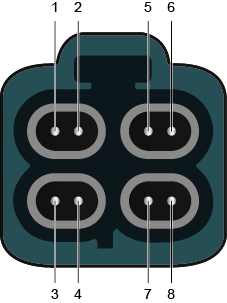
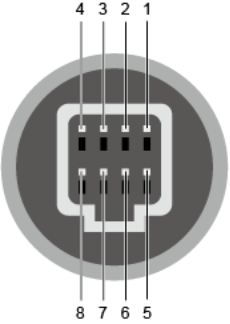
- 四合一摄像头连接器1
- 四合一摄像头连接器2
- 四合一摄像头连接器3
- 风扇连接器(接口型号,座JST/08TP-JWPF-VKLE-D 线JST/08R-JWPF-VSLE-D)
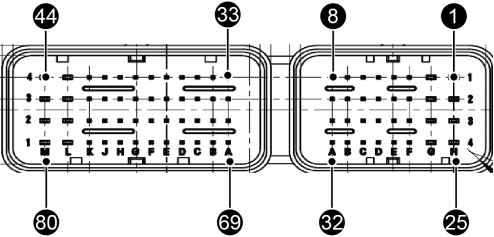
| 管脚 | 模块名 | 信号种类 | 信号名 | 电平类型 | 速率/电流 | I/O | 功能说明 |
|---|---|---|---|---|---|---|---|
| P7 | ECU(Electronic Control Unit) | CAN FD/CAN | CAN_MCU_ECU_H_0 | 2.5V/3.5V | 2Mbps/500Kbps | I/O | 连接至车载ECU,用于车辆控制。该3个CAN总线在MDC 300F无内部终端电阻。 |
| P8 | CAN_MCU_ECU_L_0 | 1.5V/2.5V | 2Mbps/500Kbps | I/O | |||
| P35 | CAN_MCU_ECU_H_1 | 2.5V/3.5V | 2Mbps/500Kbps | I/O | |||
| P36 | CAN_MCU_ECU_L_1 | 1.5V/2.5V | 2Mbps/500Kbps | I/O | |||
| P15 | CAN_MCU_ECU_H_2 | 2.5V/3.5V | 2Mbps/500Kbps | I/O | |||
| P16 | CAN_MCU_ECU_L_2 | 1.5V/2.5V | 2Mbps/500Kbps | I/O | |||
| P69 | 毫米波雷达 | CAN FD/CAN | CAN_MCU_MWRADAR_H_3 | 2.5V/3.5V | 2Mbps/500Kbps | I/O | 用于毫米波雷达接入。该CAN总线在MDC 300F有内部终端电阻。 |
| P70 | CAN_MCU_MWRADAR_L_3 | 1.5V/2.5V | 2Mbps/500Kbps | I/O | |||
| P59 | CAN_MCU_MWRADAR_H_4 | 2.5V/3.5V | 2Mbps/500Kbps | I/O | |||
| P60 | CAN_MCU_MWRADAR_L_4 | 1.5V/2.5V | 2Mbps/500Kbps | I/O | |||
| P71 | CAN_MCU_MWRADAR_H_5 | 2.5V/3.5V | 2Mbps/500Kbps | I/O | |||
| P72 | CAN_MCU_MWRADAR_L_5 | 1.5V/2.5V | 2Mbps/500Kbps | I/O | |||
| P33 | CAN_MCU_MWRADAR_H_6 | 2.5V/3.5V | 2Mbps/500Kbps | I/O | |||
| P34 | CAN_MCU_MWRADAR_L_6 | 1.5V/2.5V | 2Mbps/500Kbps | I/O | |||
| P45 | CAN_MCU_MWRADAR_H_7 | 2.5V/3.5V | 2Mbps/500Kbps | I/O | |||
| P46 | CAN_MCU_MWRADAR_L_7 | 1.5V/2.5V | 2Mbps/500Kbps | I/O | |||
| P57 | CAN_MCU_MWRADAR_H_8 | 2.5V/3.5V | 2Mbps/500Kbps | I/O | |||
| P58 | CAN_MCU_MWRADAR_L_8 | 1.5V/2.5V | 2Mbps/500Kbps | I/O | |||
| P54 | 超声波雷达 | LIN | LIN_0 | 12V | 20Kbps | I/O | 接入超声波雷达。 |
| P53 | LIN_1 | 12V | 20Kbps | I/O | |||
| P66 | LIN_2 | 12V | 20Kbps | I/O | |||
| P78 | V_VCC_12V0_USS(1驱3) | 12V | 0.3A | 电源 | |||
| P77 | PGND_ISO | 0V | - | - | |||
| P41 | 激光雷达 | UART | RS232_MCU_LIDAR_TX | (-)315V(1)(+)315V(0) | 9600Baud/s | O | 输出给激光雷达或转接盒的GPRMC信号。 |
| P39 | RS232_LIDAR_MCU_RX | I | |||||
| P42 | PPS(Pulse Per Second) | PPS_OUT_LIDAR1_RS232 | (-)315V(1)(+)315V(0) | 1Hz | O | 输出给激光雷达或转接盒的时间同步信号。 | |
| P38 | PPS_OUT_LIDAR0 | 12V | 1Hz | O | 输出给激光雷达的时间同步信息。 | ||
| P40 | PGND_ISO | 0V | - | - | 激光雷达或转接盒的串口以及时间同步信号的接地。 | ||
| P20 | GPS(Global Positioning System)+IMU(Inertial Measurement Unit) | CAN FD | CAN_GPS_H_0 | 2.5V/3.5V | 2Mbps | I/O | 用于GPS/IMU(预留)模块接入。该CAN总线在MDC 300F有内部终端电阻。 |
| P28 | CAN_GPS_L_0 | 1.5V/2.5V | 2Mbps | ||||
| P31 | PPS | PPS_GPS_CPLD_IN | 12V | 1Hz | I | 输入给MDC的同步信号。 | |
| P23 | PPS_OUT_AB | 12V | 1Hz | O | 两个盒子同步信号冗余,单盒子时线缆侧悬空。 | ||
| P19 | PPS_IN_AB | 12V | 1Hz | I | 两个盒子同步信号冗余,单盒子时线缆侧悬空。 | ||
| P11 | PGND_ISO | 0V | - | - | GPS设备的串口和PPS的接地。 | ||
| P24 | UART | RS232_MCU_GPS_TX | (-)315V(1)(+)315V(0) | 9600Baud/s | I/O | GPRMC信号。 | |
| P32 | RS232_GPS_MCU_RX | ||||||
| P44 | 电源1 | 12V电源+ | V_SBY_12V0_CONN_1 | 9~16V | 12A | I | 给MDC 300F供电。电压12V。 |
| P56 | V_SBY_12V0_CONN_1 | 9~16V | 12A | I | |||
| P43 | 12V电源- | GND_CONN_1 | 0V | - | - | ||
| P55 | GND_CONN_1 | 0V | - | - | |||
| P17 | 电源2 | 12V电源+ | V_SBY_12V0_CONN_0 | 9~16V | 12A | I | 给MDC 300F供电(预留) 。电压12V |
| P25 | V_SBY_12V0_CONN_0 | 9~16V | 12A | I | |||
| P18 | 12V电源- | GND_CONN_0 | 0V | - | - | ||
| P26 | GND_CONN_0 | 0V | - | - | |||
| P68 | - | 风扇相关 | V_VCC_12V0_FAN0_OUT | 12V | 5A | O | 风扇供电。 |
| P80 | - | FAN_PWM_CTRL0 | 12V | - | O | 风扇调速。 | |
| P79 | - | FAN_STAT0_CON | 12V | - | I | 检测风扇。 | |
| P67 | - | GND | 0V | - | - | 风扇地。 | |
| P9 | - | V_VCC_12V0_FAN_OUT | 12V | 5A | O | 风扇供电。 | |
| P1 | - | FAN_PWM_CTRL1 | 12V | - | O | 风扇调速。 | |
| P10 | - | FAN_STAT1_CON | 12V | - | I | 检测风扇。 | |
| P2 | - | GND | 0V | - | - | 风扇地。 | |
| P52 | 杂散信号 | ACC(Accessory) | ACC_12V_IN | 12V | - | I | 汽车状态信号。 |
| P51 | GPIO | GPO_0 | 12V | - | O | - | |
| P75 | GPO_1 | 12V | - | O | - | ||
| P62 | GPO_2 | 12V | - | O | - | ||
| P65 | GPI_0 | 12V | - | I | - | ||
| P76 | GPI_1 | 12V | - | I | - | ||
| P63 | GPI_2 | 12V | - | I | - | ||
| P64 | GND(Ground) | PGND_ISO | 0V | - | - | 提供回流地。 | |
| P5 | AB系统直连信号 | CAN FD | CAN_MCU_AB_H_9 | 2.5V/3.5V | 2Mbps | I/O | 用于两个ECU直连。 |
| P6 | CAN_MCU_AB_L_9 | 1.5V/2.5V | 2Mbps | I/O | |||
| P47 | CAN_MCU_AB_H_10 | 2.5V/3.5V | 2Mbps | I/O | |||
| P48 | CAN_MCU_AB_L_10 | 1.5V/2.5V | 2Mbps | I/O | |||
| P37 | Slot ID信号 | GPIO | SLOT_ID_0 | 3.3V | - | I | 状态信号,单盒子时线缆侧悬空。 |
| P50 | SLOT_ID_1 | 3.3V | - | I | 状态信号,单盒子时线缆侧接地。 | ||
| P49 | SLOT_ID_2 | 3.3V | - | I | 状态信号,单盒子时线缆侧悬空。 | ||
| P27 | SLOT_ID_3 | 3.3V | - | I | 状态信号,单盒子时线缆侧悬空。 | ||
| P61 | GND | PGND_ISO | 0V | - | - | 提供回流地。 | |
| Debug | GND | PGND_ISO | 0V | - | - | 提供回流地。 | |
| P73 | RS232 | RS232_CPLD_DEBUG_TX | (-)315V(1)(+)315V(0) | 115200Baud/s | I/O | Debug调试口。 | |
| P74 | RS233_CPLD_DEBUG_RX | ||||||
| P3 | 普通千兆网络 | GE(Gigabit Ethernet) | GE_GSW0_CON_X0_P | - | 250Mbps | - | 调试口。 |
| P4 | GE_GSW0_CON_X0_N | - | 250Mbps | - | |||
| P12 | GE_GSW0_CON_X1_P | - | 250Mbps | - | |||
| P13 | GE_GSW0_CON_X1_N | - | 250Mbps | - | |||
| P21 | GE_GSW0_CON_X2_P | - | 250Mbps | - | |||
| P22 | GE_GSW0_CON_X2_N | - | 250Mbps | - | |||
| P29 | GE_GSW0_CON_X3_P | - | 250Mbps | - | |||
| P30 | GE_GSW0_CON_X3_N | - | 250Mbps | - | |||
| P14 | GND | PGND_ISO | 0V | - | - |
这里留意:
2020年1月20日前提供的80P低速线缆,CAN总线颜色为:CAN_H绿色,CAN_L黄色。
2020年1月20日后提供的80P低速线缆,CAN总线颜色为:CAN_H黄色,CAN_L绿色。
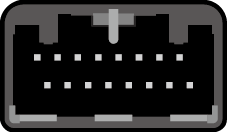
| 管脚 | 信号 | 信号用途 |
|---|---|---|
| P1 | MDI_IOPHY_0_CON_P | 标准车载以太网接口,对接车载以太网交换机,速率为1G,具体协议为1000BASE-T1。 |
| P2 | MDI_IOPHY_0_CON_N | |
| P3 | MDI_IOPHY_1_CON_P | |
| P4 | MDI_IOPHY_1_CON_N | |
| P5 | MDI_IOPHY_2_CON_P | |
| P6 | MDI_IOPHY_2_CON_N | |
| P7 | MDI_IOPHY_3_CON_P | |
| P8 | MDI_IOPHY_3_CON_N |
| 管脚 | 信号 | 电压 | 信号用途 |
|---|---|---|---|
| P1 | GMSL和屏蔽地 | 10V | 提供Camera输入。 |
| P2 | GMSL和屏蔽地 | 10V | 提供Camera输入。 |
| P3 | GMSL和屏蔽地 | 10V | 提供Camera输入。 |
| P4 | GMSL和屏蔽地 | 10V | l 四合一摄像头连接器3是预留接口。l 四合一摄像头连接器1和2提供Camera输入。 |
| 管脚 | 信号 | 电压 | 信号用途 |
|---|---|---|---|
| P1 | 电源 | 12V | 风扇供电。 |
| P2 | FG(Frequency Generator) | 12V | 风扇转速反馈。 |
| P3 | PWM(Pulse-Width Modulation) | 12V | 风扇PWM控制。 |
| P4 | GND | 0V | 回流地。 |
| P5 | 电源 | 12V | 风扇供电。 |
| P6 | FG | 12V | 风扇转速反馈。 |
| P7 | PWM | 12V | 风扇PWM控制。 |
| P8 | GND | 0V | 回流地。 |
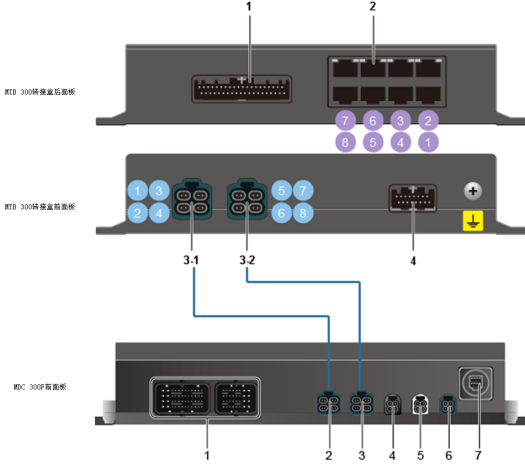
连接MTB300 转接盒
| 转接盒通用以太端口 | 速率 | 功能 |
|---|---|---|
| 1 | 100M | 对接激光雷达,最多接入6个。 |
| 2 | 100M | |
| 3 | 100M | |
| 4 | 100M | |
| 5 | 100M | |
| 6 | 100M | |
| 7 | 1000M | 1000M调试网口。 |
| 8 | 1000M | 用于系统PXE升级。 |
MDB 300 转接盒

接口
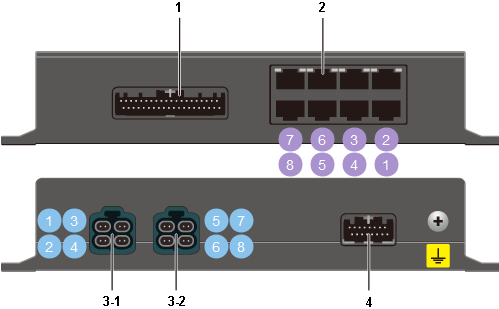
| 序号 | 连接器名称 | 板端连接器厂家/型号 | 线端连接器厂家/型号 | 华为配套线缆(选配) | 说明 |
|---|---|---|---|---|---|
| 1 | 低速连接器1 | JAE/MX84B040NF1 | JAE/MX84B040SF1 | 40P低速线缆(编码04720002):详细线缆信息请参见B.1 40P低速线缆。 | 提供8路激光雷达时间信息和时间同步,用于对接激光雷达。 |
| 2 | 通用以太连接器 | FOXCONN/JFM38C1D-H3V4-4FPULSE/JXC0-3062NL意华/JDG240830239 | RJ45水晶头 | 通用网线 | 提供8个通用以太网(100/1000BASE-T)接口,用于对接8路激光雷达或其他通用以太接口设备(例如,T-BOX等)。 |
| 3-1 | 四合一车载以太连接器1 | Rosenberger/E6S20D-40MT5-Z | Rosenberger/E6K10D-1CAZ5-Z | 四转四车载以太线(编码04720007):对接MDC 300F,详细线缆信息请参见C 4转4车载以太线缆。 | 提供4路车载以太100BASE-T1接口,对接其中一个MDC 300F(例如,MDC 300F-A)。 |
| 3-2 | 四合一车载以太连接器2 | 提供2路车载以太100BASE-T1接口(端口5/6)和2路车载以太1000BASE-T1接口(端口7/8),对接另一个MDC 300F(例如,MDC 300F-B)。 | |||
| 4 | 低速连接器2 | JAE/MX84B016NF1 | JAE/MX84B016SF1 | 16P低速线缆(编码04720003):详细线缆信息请参见B.2 16P低速线缆。 | l 接收MDC 300F提供的时间信息和时间同步,对接其中一个MDC 300F(例如,MDC 300F-A)。l 提供调试串口,对接其中一个MDC 300F(例如,MDC 300F-A)。 |
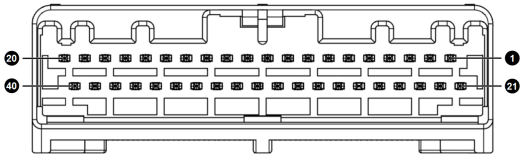
| 管脚 | 模块名 | 信号种类 | 信号名 | 电平类型 | 速率 | I/O | 功能说明 |
|---|---|---|---|---|---|---|---|
| P1 | 激光雷达1 | GPIO(General-Purpose Input/Output) | GPS_LIDAR1_RS232_TX | -3-15V(1)+3+15V(0) | 9600Baud/s | O | 输出时间信息给激光雷达1。 |
| P22 | PPS_LIDAR1_5V0_TX | 0V/5V | 1Hz | O | 输出PPS(Pulse Per Second)信息给激光雷达1。 | ||
| P21 | PPS_LIDAR1_3V3_TX | 0V/3.3V | 1Hz | O | |||
| P3 | PPS_LIDAR1_RS232_TX | -3-15V(1)+3+15V(0) | 1Hz | O | |||
| P2 | GND_Lidar1 | 0V | - | - | 提供回流地。 | ||
| P4 | 激光雷达2 | GPIO | GPS_LIDAR2_RS232_TX | -3-15V(1)+3+15V(0) | 9600Baud/s | O | 输出时间信息给激光雷达2。 |
| P24 | PPS_LIDAR2_5V0_TX | 0V/5V | 1Hz | O | 输出PPS信息给激光雷达2。 | ||
| P23 | PPS_LIDAR2_3V3_TX | 0V/3.3V | 1Hz | O | |||
| P25 | PPS_LIDAR2_RS232_TX | -3-15V(1)+3+15V(0) | 1Hz | O | |||
| P5 | GND_Lidar2 | 0V | - | - | 提供回流地。 | ||
| P6 | 激光雷达3 | GPIO | GPS_LIDAR3_RS232_TX | -3-15V(1)+3+15V(0) | 9600Baud/s | O | 输出时间信息给激光雷达3。 |
| P27 | PPS_LIDAR3_5V0_TX | 0V/5V | 1Hz | O | 输出PPS信息给激光雷达3。 | ||
| P26 | PPS_LIDAR3_3V3_TX | 0V/3.3V | 1Hz | O | |||
| P8 | PPS_LIDAR3_RS232_TX | -3-15V(1)+3+15V(0) | 1Hz | O | |||
| P7 | GND_Lidar3 | 0V | - | - | 提供回流地。 | ||
| P9 | 激光雷达4 | GPIO | GPS_LIDAR4_RS232_TX | -3-15V(1)+3+15V(0) | 9600Baud/s | O | 输出时间信息给激光雷达4。 |
| P29 | PPS_LIDAR4_5V0_TX | 0V/5V | 1Hz | O | 输出PPS信息给激光雷达4。 | ||
| P28 | PPS_LIDAR4_3V3_TX | 0V/3.3V | 1Hz | O | |||
| P30 | PPS_LIDAR4_RS232_TX | -3-15V(1)+3+15V(0) | 1Hz | O | |||
| P10 | GND_Lidar4 | 0V | - | - | 提供回流地。 | ||
| P11 | 激光雷达5 | GPIO | GPS_LIDAR5_RS232_TX | -3-15V(1)+3+15V(0) | 9600Baud/s | O | 输出时间信息给激光雷达5。 |
| P32 | PPS_LIDAR5_5V0_TX | 0V/5V | 1Hz | O | 输出PPS信息给激光雷达5。 | ||
| P31 | PPS_LIDAR5_3V3_TX | 0V/3.3V | 1Hz | O | |||
| P13 | PPS_LIDAR5_RS232_TX | -3-15V(1)+3+15V(0) | 1Hz | O | |||
| P12 | GND_Lidar5 | 0V | - | - | 提供回流地。 | ||
| P14 | 激光雷达6 | GPIO | GPS_LIDAR6_RS232_TX | -3-15V(1)+3+15V(0) | 9600Baud/s | O | 输出时间信息给激光雷达6。 |
| P34 | PPS_LIDAR6_5V0_TX | 0V/5V | 1Hz | O | 输出PPS信息给激光雷达6。 | ||
| P33 | PPS_LIDAR6_3V3_TX | 0V/3.3V | 1Hz | O | |||
| P35 | PPS_LIDAR6_RS232_TX | -3-15V(1)+3+15V(0) | 1Hz | O | |||
| P15 | GND_Lidar6 | 0V | - | - | 提供回流地。 | ||
| P16 | 激光雷达7 | GPIO | GPS_LIDAR7_RS232_TX | -3-15V(1)+3+15V(0) | 9600Baud/s | O | 输出时间信息给激光雷达7。 |
| P37 | PPS_LIDAR7_5V0_TX | 0V/5V | 1Hz | O | 输出PPS信息给激光雷达7。 | ||
| P36 | PPS_LIDAR7_3V3_TX | 0V/3.3V | 1Hz | O | |||
| P18 | PPS_LIDAR7_RS232_TX | -3-15V(1)+3+15V(0) | 1Hz | O | |||
| P17 | GND_Lidar7 | 0V | - | - | 提供回流地。 | ||
| P19 | 激光雷达8 | GPIO | GPS_LIDAR8_RS232_TX | -3-15V(1)+3+15V(0) | 9600Baud/s | O | 输出时间信息给激光雷达8。 |
| P39 | PPS_LIDAR8_5V0_TX | 0V/5V | 1Hz | O | 输出PPS信息给激光雷达8。 | ||
| P38 | PPS_LIDAR8_3V3_TX | 0V/3.3V | 1Hz | O | |||
| P40 | PPS_LIDAR8_RS232_TX | -3-15V(1)+3+15V(0) | 1Hz | O | |||
| P20 | GND_Lidar8 | 0V | - | - | 提供回流地。 |
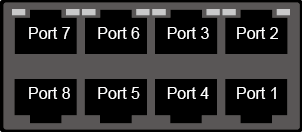
| 端口 | 信号 | 对应的车载以太网端口 | 信号用途 |
|---|---|---|---|
| Port1 | 100M通用以太网络 | 图2-1车载以太端口1 | 标准通用以太网接口,对接8路激光雷达或其他网络设备(例如,T-BOX等)。其中:l 6路100M通用以太网接口,协议是100BAST-T。l 2路1000M通用以太网接口,协议是1000BASE-T。 |
| Port2 | 图2-1车载以太端口2 | ||
| Port3 | 图2-1车载以太端口3 | ||
| Port4 | 图2-1车载以太端口4 | ||
| Port5 | 图2-1车载以太端口5 | ||
| Port6 | 图2-1车载以太端口6 | ||
| Port7 | 1000M通用以太网络 | 图2-1车载以太端口7 | |
| Port8 | 图2-1车载以太端口8 |
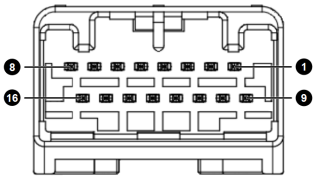
| 模块名 | 信号种类 | 信号名 | 电平类型 | 速率 | I/O | 功能说明 | 管脚 |
|---|---|---|---|---|---|---|---|
| MDC 300F-A | GPIO | GPS_MDC_RS232_IN_A | -3-15V(1)+3+15V(0) | 9600Baud/s | I | MDC 300F-A通过RS232串口给转接盒提供时间信息。 | P8 |
| GPS_MDC_RS232_OUT_A | -3-15V(1)+3+15V(0) | 9600Baud/s | O | P5 | |||
| PPS_MDC_12V_IN_A | 12V | 1Hz | I | MDC 300F-A通过PPS给转接盒提供时间同步信息。 | P6 | ||
| GND_MDC_A | 0V | - | - | 提供回流地。 | P7 | ||
| RS232 | RS232_RX_CPLD | -3-15V(1)+3+15V(0) | 9600Baud/s | I | 接入MDC 300F-A,用于调试转接盒。 | P4 | |
| RS232_TX_CPLD | -3-15V(1)+3+15V(0) | 9600Baud/s | O | P3 | |||
| MDC 300F-B | GPIO | GPS_MDC_RS232_IN_B | -3-15V(1)+3+15V(0) | 9600Baud/s | I | MDC 300F-B通过RS232串口给转接盒提供时间信息。 | P10 |
| GPS_MDC_RS232_OUT_B | -3-15V(1)+3+15V(0) | 9600Baud/s | O | P11 | |||
| PPS_MDC_12V_IN_B | 12V | 1Hz | I | MDC 300F-B通过PPS给转接盒提供时间同步信息。 | P12 | ||
| GND_MDC_B | 0V | - | - | 提供回流地。 | P2 | ||
| 电源 | 电源 | V_CONV_12V0_CONN | 9~16V | 0.67A | I | 连接至车载电池,用于供电。 | P1 |
| GND_CONN | 0V | - | - | 提供回流地。 | P9 |
交流联系 13717005400
最后
以上就是单薄小熊猫最近收集整理的关于华为MDC-300计算平台的全部内容,更多相关华为MDC-300计算平台内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复