一般地,处理三维空间的旋转有两种方式:四元数法或者欧拉角
在unity引擎中选择了四元数法。
欧拉角方法就是简单的对物体自身xyz中某一轴的旋转,听起来很直观容易理解。但是欧拉角会出现Gimbal lock 问题,因为在一系列的对xyz轴的旋转中,物体自身对应的xyz轴本身也在跟随物体进行旋转,导致下一步的旋转受到影响,这也就是使用相对坐标系而没有使用绝对坐标系的问题所在。
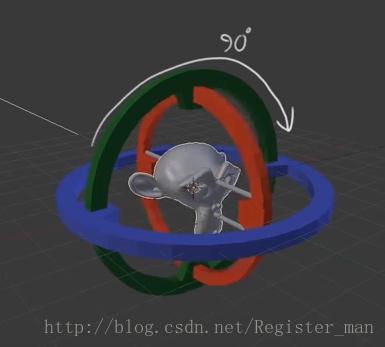
图中红色为X轴,绿色为y轴,蓝色为z轴,物体为猴头 我们可以很自由的将模型按照任意一轴进行旋转。
当我们将物体按照y轴方向旋转90度
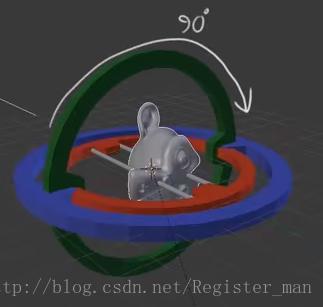
我们发现x轴和z轴重合了,这时旋转x轴和旋转z轴的效果就一模一样了,我们无法将物体按照之前的x轴方向进行旋转了。此时就被称作Gimbal l
最后
以上就是时尚乌龟最近收集整理的关于Gimbal Lock(万向节锁)在 Euler Angles(欧拉角)中的体现的全部内容,更多相关Gimbal内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复