Group meeting: Reactive Control of Autonomous Drones.
Bharath taught me how to debug a python project for the whole afternoon. Learned a lot!
def is_armable(self):
return self.mode != 'INITIALISING' and self.gps_0.fix_type > 1 and self._ekf_predposhorizabsAfter delete self.gps_0.fix_type > 1, it still does not work.
Check what self._ekf_predposhorizabs is:
self._ekf_predposhorizabs = (m.flags & ardupilotmega.EKF_PRED_POS_HORIZ_ABS) > 0Delete either one of m.flags or ardupilotmega.EKF_PRED_POS_HORIZ_ABS, the vehicle is armable, but if they both exist, the vehicle is not.
Display the value: m.flags == 165 and ardupilotmega.EKF_PRED_POS_HORIZ_ABS == 512 (165 & 512 == 0)
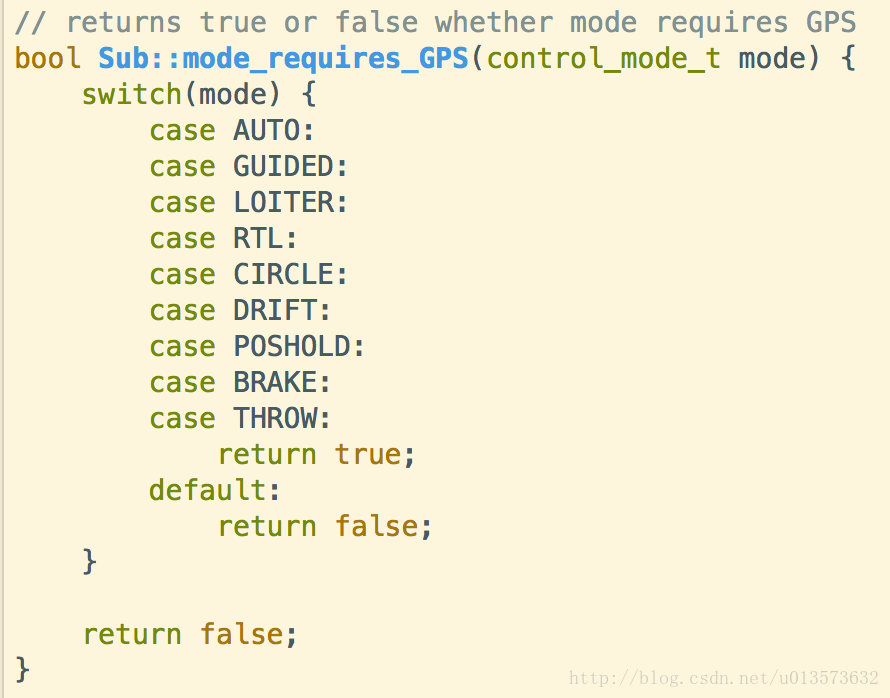
// Auto Pilot Modes enumeration
enum control_mode_t {
STABILIZE = 0, // manual airframe angle with manual throttle
ACRO = 1, // manual body-frame angular rate with manual throttle
ALT_HOLD = 2, // manual airframe angle with automatic throttle
AUTO = 3, // fully automatic waypoint control using mission commands
GUIDED = 4, // fully automatic fly to coordinate or fly at velocity/direction using GCS immediate commands
LOITER = 5, // automatic horizontal acceleration with automatic throttle
RTL = 6, // automatic return to launching point
CIRCLE = 7, // automatic circular flight with automatic throttle
LAND = 9, // automatic landing with horizontal position control
OF_LOITER = 10, // deprecated
DRIFT = 11, // semi-automous position, yaw and throttle control
SPORT = 13, // manual earth-frame angular rate control with manual throttle
FLIP = 14, // automatically flip the vehicle on the roll axis
AUTOTUNE = 15, // automatically tune the vehicle's roll and pitch gains
POSHOLD = 16, // automatic position hold with manual override, with automatic throttle
BRAKE = 17, // full-brake using inertial/GPS system, no pilot input
THROW = 18 // throw to launch mode using inertial/GPS system, no pilot input
};
最后
以上就是虚心小蚂蚁最近收集整理的关于BlueROV-16: Solve the initialization problem的全部内容,更多相关BlueROV-16:内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复