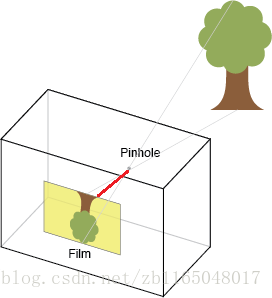
内参矩阵是将3D相机坐标变换到2D齐次图像坐标。透视投影的一个理想模型就是针孔相机。
内参矩阵如下
其中每一个参数都有实际意义。
- 表示焦距的参数:fx,fy
焦距就是真空与图像平面(投影屏幕)的距离,类似于人眼和视网膜,焦距的度量是针对像素的。针孔相机的fx,fy
有相同的值。上图中红线部分就是焦距。但是在实际中,fx和fy一般不同,因为
数码相机传感器的缺陷
后处理中图像被非均匀缩放
相机透镜导致的无意的失真
相机使用了失真的格式,透镜将宽屏场景压缩到标准大小的传感器中
相机校准的误差
- 主点偏移x0,y0
相机的主轴是与图像平面垂直且穿过真空的线,它与图像平面的焦点称为主点。
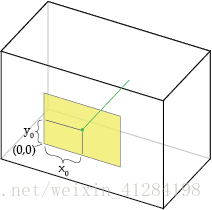
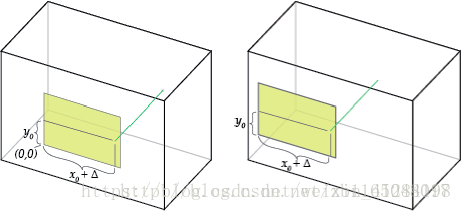
主点偏移就是主点位置相对于图像平面(投影面)的位置。上图中,增加x0的值相当于把针孔向右移动,等价将投影面向左移动同时保持针孔位置不变。
将内参矩阵分解为切变(shear,类似于将长方形压成平行四边形的变形方式)、缩放,平移变换,分别对应轴倾斜、焦距、主点偏移
第二个等式右边三个矩阵依次是:2D平移、2D缩放、2D切变
最后
以上就是多情世界最近收集整理的关于内参矩阵的全部内容,更多相关内参矩阵内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复